




In contrast to technology and science, in everyday life, a distinction is rarely made between regulation and control. A mere control system does not monitor the output value, meaning that it can change due to external disturbances. A simple and typical example is the speed control of a DC motor by PWM. Here, the speed of the motor is also influenced by load fluctuations.
Now to the control: If speed is to be kept constant, feedback is required, for example, to adjust a controlling PWM or DC voltage depending on the speed deviation. Such a feedback system characterizes a control loop.
Control, therefore, means that the output variable (e.g. speed) is captured and, in the event of a deviation from the target value, the manipulated variable (here the PWM) is changed accordingly.
BalBot: a Self-Balancing Robot – [Link]
RELATED POSTS
 27 August, 2018 Smark – Your Language Translator Companion that Supports 37+ Languages
27 August, 2018 Smark – Your Language Translator Companion that Supports 37+ Languages 8 July, 2024 LILYGO T-Glass IS A Google Glass Like Smart Glass Powered by an ESP32-S3
8 July, 2024 LILYGO T-Glass IS A Google Glass Like Smart Glass Powered by an ESP32-S3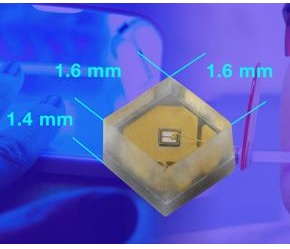 2 August, 2016 Mid-power UV LED operates at 365 nm
2 August, 2016 Mid-power UV LED operates at 365 nm 17 January, 2019 Cosmo Communicator Smartphone Runs Android 9 or Linux
17 January, 2019 Cosmo Communicator Smartphone Runs Android 9 or Linux 16 May, 2023 Nexperia NCA95xx I2C GPIO Expanders
16 May, 2023 Nexperia NCA95xx I2C GPIO Expanders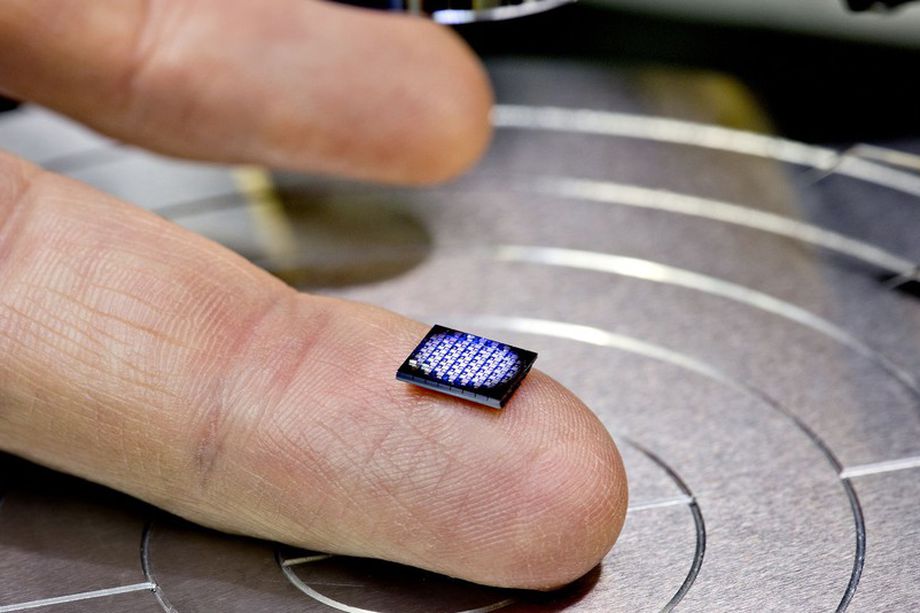 21 March, 2018 IBM just unveiled the ‘world’s smallest computer’
21 March, 2018 IBM just unveiled the ‘world’s smallest computer’






