Neousys Technology, the embedded computing platforms manufacturer, has announced plans to launch an ultra-compact, rugged fanless in-vehicle computer called the POC-551VTC. The new computer was designed as an upgrade to the POC-500 embedded computer which the company released a while back and it comes with several I/O ports to serve applications around wireless communication, mobile Surveillance, in-vehicle entertainment, and fleet management to mention a few.
Featuring the same AMD’s Ryzen Embedded V1000 family of x86-based SoC used in the POC-500 with the AMD Ryzen™ Embedded V1605B processor, the POC-551VTC combines two of AMD’s strongest chips, the Zen x86 core architecture with Vega GPU into a small BGA package. Leveraging on 4-cores and 8-threads, POC-551VTC delivers the equivalent processing power of an Intel 6th Gen. Core i7 U-series, coupled with the unprecedented 3.6 TFLOPS in FP16, delivered by the Radeon Vega GPU.
Designed with an understanding of the connected nature which cars are now attaining, the POC-551VTC comes with three full-size mini-PCIe sockets and one M.2 B key with an internal SIM socket for 3G/4G, GPS or WiFi module installation. To ensure seamless connections with little or no dead zones, the device also comes with expansion sockets that allow users to connect to multiple operators, and facilitate a seamless switch from one operator to another.
Four in-vehicle connections and usage, the POC-551VTC comes with; a CAN 2.0 port, four USB 3.1 Gen1 ports, four COM ports, and 4-CH isolated D I/O for data communication between different types of devices. It also comes with 4(four) 802.3at PoE+ ports which are capable of supplying up to 25W of power to connected devices like IP cameras. All ports on the POC-551VTC come with a screw-lock mechanism to ensure cable connections are secure.
All these features are packed into a, quite small 64 x 176 x 116 mm (2.5″ x 6.9″ x 4.6″) form factor, with an enclosure built with Neousys’ proven thermal design. The ruggedized nature of the POC-551VTC ensures its ability to operate at a temperature between -40℃ to 70℃,, and support a wide range input voltage (8~35V DC) with a built-in ignition control, which protects the system with gentle shutdowns.
The POC-551VTC comes with; the E-mark, which means it is certified for in-vehicle deployment, and the EN-50155 and EN-45545-2 certifications for railway fire and smoke safety.
All of these features including the certifications, extraordinary processor performance, numerous I/Os, communication ports, and compact form factors makes the POC-551VTC, deployment-ready for any transportation-related applications.
There is currently no information as regards the price and availability of this device as the product page only had the specs. We will, however, keep a close watch and update the article the moment this information is available.
More information on the Specifications and features of the POC-551VTC can be found on the Neosys’s Website.
New series builds on previous 2000X models to bring 200Mpt memory, 10” touch-screen, external mouse/keyboard control, built-in web server, and 50MHz waveform generator
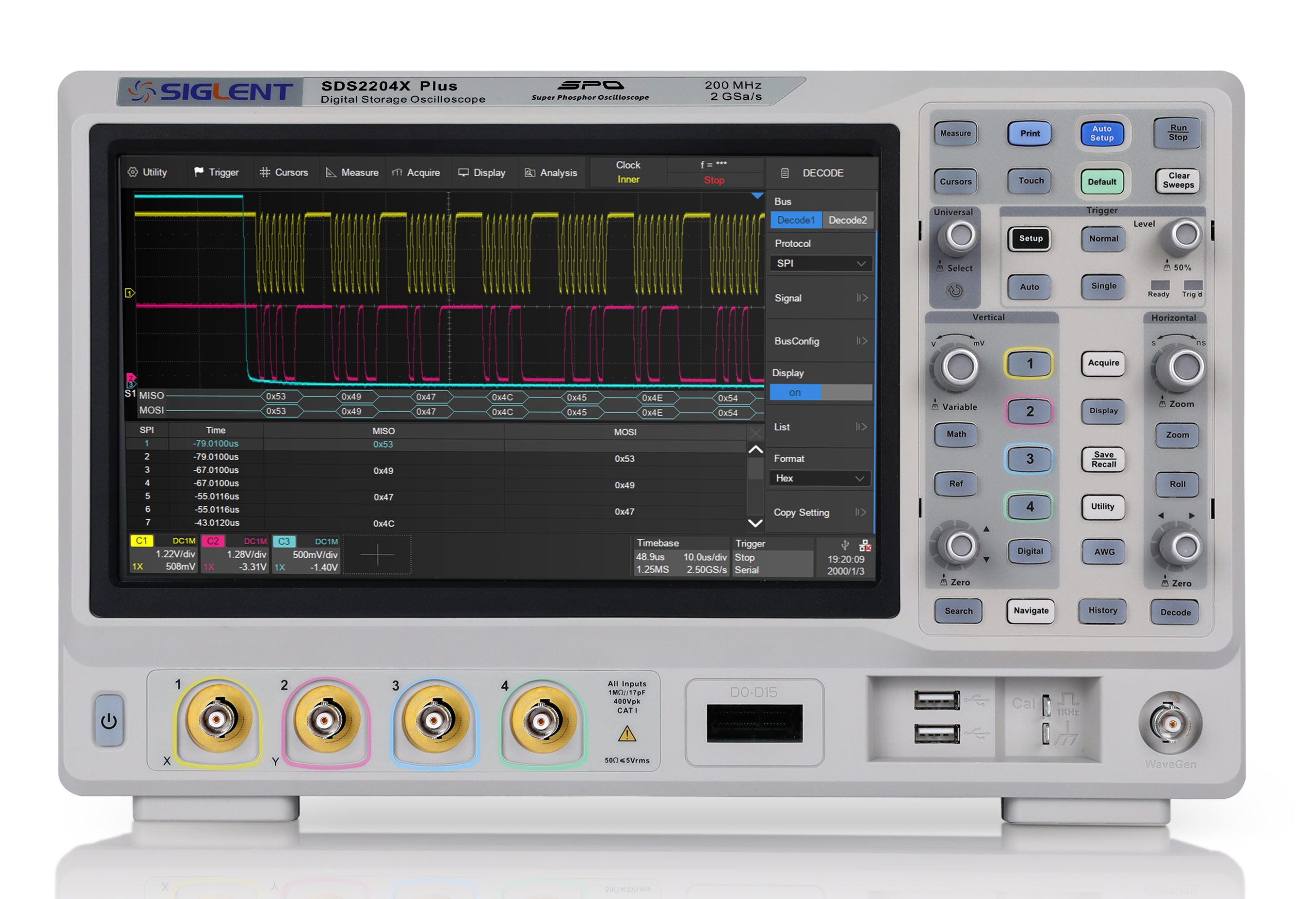
Saelig Company, Inc. has introduced the new Siglent SDS2000X Plus Digital Oscilloscope Series consisting of four models: one 2-channel 100MHz bandwidth (software upgradeable to 350MHz) and three 4-channel models (100/200/350MHz.) The 350MHz models can be upgraded to 500MHz on two independent channels. A large 10.1” capacitive touch-screen supports multi-touch gestures. The oscilloscope range also offers a 10-bit acquisition mode that uses oversampling to achieve higher resolution than most scopes. Combined with the lowest vertical setting of 500μV/div, the X Plus series can display extremely small signal details. The 4-channel models all feature dual 2GSa/s ADCs and also dual 200Mpt memory modules. This enhanced memory depth enables a high sample rate at larger time/div settings. This is valuable when analyzing high-frequency content on slowly changing signals by providing the detail needed, regardless of time-base settings.
Siglent SDS2000X Plus Digital Oscilloscope Series
The SDS2000X Plus uses the versatile user interface of the higher performance SDS5000X series. This includes the capabilities of a 10” touch-screen, and external mouse/keyboard control.
With waveform capture rates of up to 120,000 wfms/sec, the sequence mode boosts the capture rate to 500,000wfm/s to ensure the capture of critical events and rare signal anomalies. A built-in 50MHz function generator is optionally available together with a free Bode plot function to deliver convenient and low cost frequency analysis. The LAN port supports easy remote control via a built-in webserver using a web-browser or SCPI remote commands.
The X Plus series also features a Power Analysis option for automatic on-screen performance analysis of common power supply characteristics. Siglent’s optional probes for current and differential voltage measurements make a valuable addition for power design applications. When developing switch-mode power supplies (SMPS), Bode plots are a convenient way to measure the phase and gain margin of feedback loop systems to determine the stability of the design. This is now easily performed on the SDS2000X Plus series.
The SDS2000X Plus series of oscilloscopes is made by Siglent Technologies, a leading high quality test equipment manufacturer, with a growing worldwide reputation. This series is available now from Saelig, their USA technical distributor.
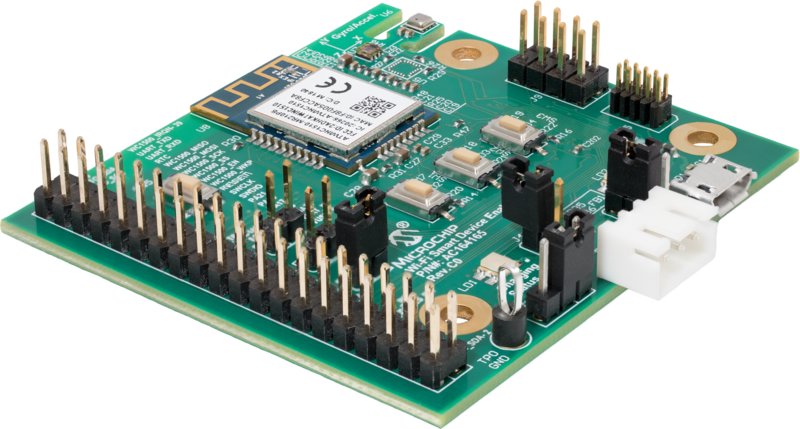
Microchip’s Wi-Fi® Smart Device Enablement Kit is designed to accelerate adding Alexa Voice Control to your existing application, enabling rapid prototyping.
The kit allows you to use an Alexa Smart Speaker or the Alexa App to control the board’s GPIO, interrogate its sensors, and change its LED colors. By following our Alexa skill examples, you can create custom Alexa skills to further enhance the operation for your application. For more information please visit the GitHub page HERE
To get started using the Wi-Fi Smart Device Enablement Board, please visit: www.microchip.com
RFID based projects are one of the most popular Arduino projects out there and we have also built a couple of them here too, but I recently came across an RFID access control project by hwhardsoft that was built using the ArduiTouch MKR enclosures. The ready-made nature of the enclosures and their existence for different kinds of boards caught my attention and I felt it might be of interest to most readers here too. So for today’s project, we will build an RFID based Access Control system using the ArduiTouch MKR enclosure, an Arduino MKR WiFi 1010 and an InnovateKing-EU RFID reader.
RFID Access Control System
The ArduiTouch series of enclosures come with a display already fitted on a PCB specifically designed for a specific family of maker board. The best way to describe them will be “evaluation boards with screens and enclosures for maker boards”. The ArduiTouch MKR enclosure to be used today, was designed for the Arduino MKR family of boards and it comes with; an 120 x 80 x 33 mm enclosure for top wall mounting, a 2.4-inch resistive touch TFT, an integrated voltage regulator, an integrated piezo beeper, breadboard area for easy mounting of components, and a slot for an MKR shield.
All of the above features make it easy to create a very nice looking RFID reader, with TFT output for wall/door mounting with an Arduino MKR of your choice. The Arduino MKR of choice selected for this tutorial is the Arduino MKR WiFi 1010, and the RFID module selected is the InnovateKing-EU RFID Reader.
At the end of today’s tutorial, you would know not only how to build a fancy RFID reader but also the intricacies of working with an ArduiTouch MKR Enclosure and using the InnovateKing-EU RFID Reader.
Required Components
The following components are required to build this project:
All of these components can be bought via the attached links, and you could choose to go with other versions/types of components like a different Arduino MKR board or a different RFID Reader. Just ensure you take note of the changes that might be introduced into other parts of the project (like schematics and code) as a result of that.
Schematics
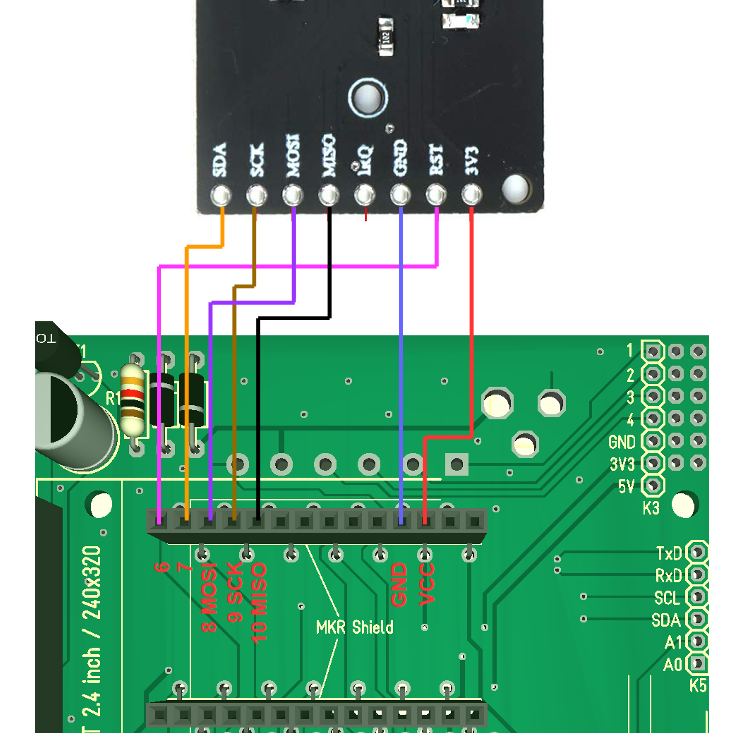
As mentioned earlier, today’s project is centered around the ArduiTouch MKR evaluation board. What this means is that we do not need to worry about arranging the components on a breadboard or designing a PCB to make things compact. All we need to do is to connect the components to the right pins on the ArduiTouch MKR PCB and off we go. The display and Arduino MKR WiFi 1010 already have their pins mapped out on the board as such we only need to plug them in, but the InnovateKing-EU RFID Reader needs to be connected to specific pins on the board. The schematics showing how it is connected is provided in the image below;
Schematics
The InnovateKing-EU RFID reader is connected to the SPI pins of the MKR. A pin to pin map describing the connection is provided below:
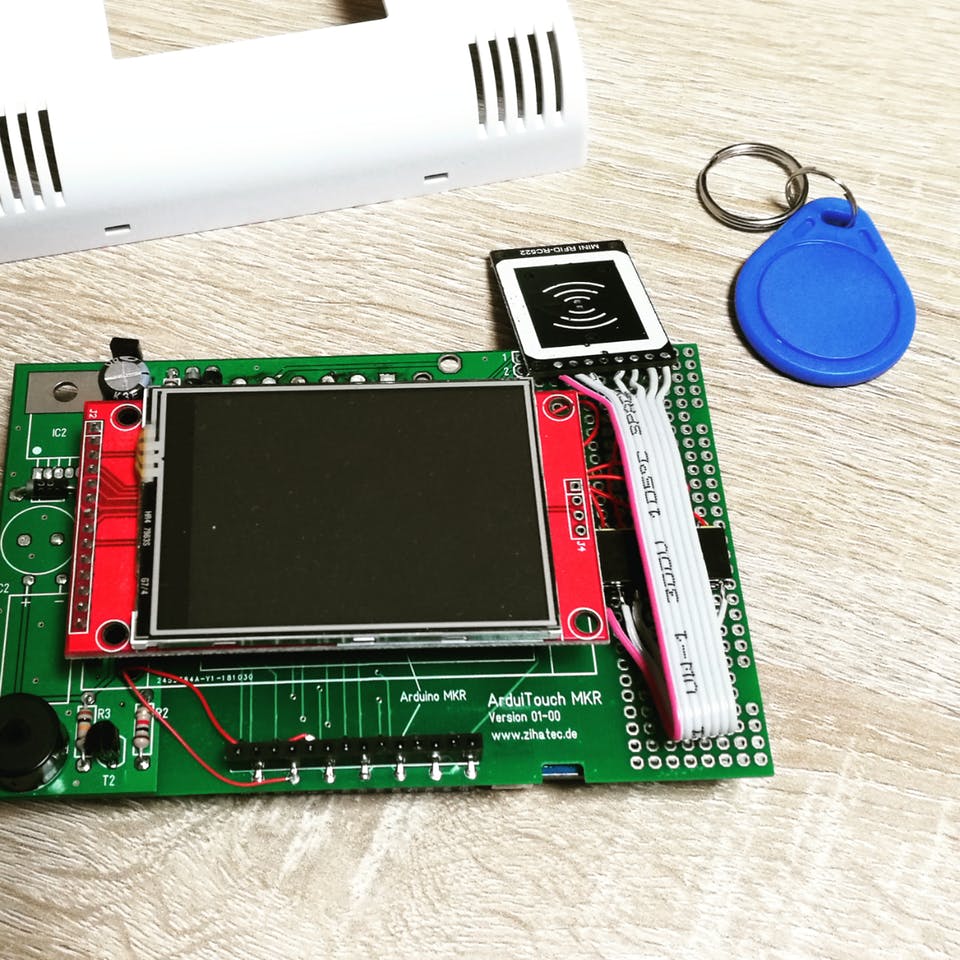
You can connect the RFID Reader using jumper cables such that, the complete setup with all the components plugged in, looks like the image below.
With this done, we can proceed to write the code for the project.
Code
The code for this project is quite straightforward. We will read the UID of the RFID tags and if they match pre-stored UID values, we will take certain actions like triggering a relay and displaying Access granted or Denied along with the UID of the tag. The relay triggering action could be matched to so many things like a door lock being opened among other things.
To reduce the amount of work we have to do with writing the code, we will be using three major libraries including; the Adafruit GFX Library, the Adafruit ILI9341 Library, and the MFRC522 Library. The MFRC522 library facilitates interaction with the RFID reader while the ILI9341 and GFX libraries facilitate the display of text and graphics on the TFT. All three libraries can be downloaded from the links attached to each of them or installed via the Arduino Library Manager.
With the libraries installed, we can then proceed to write the code for the project. As usual, I will do a quick breakdown of the code, explaining key concepts.
We start the code as usual by including the libraries and header files we will be working with. Asides the libraries already mentioned above, we will be using some fonts and usergraphics. .h header file which contains the char representation of the custom images that will be displayed on the TFT. You can check out this tutorial on displaying custom graphics on LCD display to learn how the .h file was created.
Next, we declare the pins of the Arduino MKR to which the pins of the TFT LCD, along with other components like the relay and RFID readers, are connected.
Next, the calibration value for the screen is entered, this can be obtained by running the calibration sketch in the Adafruit ILI9341 library.
/*____Calibrate Touchscreen_____*/
#define MINPRESSURE 10 // minimum required force for touch event
#define TS_MINX 370
#define TS_MINY 470
#define TS_MAXX 3700
#define TS_MAXY 3600
/*______End of Calibration______*/
Next, we need to specify the UID’s to be allowed access. Normally this should have been done using an “enroll” process but to save time, you can get the UID of each card by uploading the code to the board and trying out each of the tags. Their UID will be displayed at the bottom of the result and you can then enter that UID into the sketch and re-upload the code. This is definitely not elegant and should be an improvement to the project.
/*___Keylock spezific definitions___*/
byte blue_uid[] = {0x09, 0x8D, 0x9D, 0xA3};
#define relay_on_time 30 // will set the relay on for 3s
/*___End of Keylock spezific definitions___*/
Next, we create an instance of the libraries and create a few more variables to hold different parameters during the code execution.
Adafruit_ILI9341 tft = Adafruit_ILI9341(TFT_CS, TFT_DC);
XPT2046_Touchscreen touch(TOUCH_CS);
MFRC522 mfrc522(SS_PIN, RST_PIN);
int X,Y;
long Num1,Num2,Number;
char action;
boolean result = false;
bool Touch_pressed = false;
TS_Point p;
int RELAYTMR = 0; // Timer for relay control
int blue_check = false;
int red_check = false;
String s1;
With this done, we move to the void setup() function. We start the function by initializing the serial monitor and setting the pin mode of the Relay pin.
void setup() {
Serial.begin(115200); //Use serial monitor for debugging
pinMode(TFT_LED, OUTPUT); // define as output for backlight control
pinMode(RELAY, OUTPUT); // define as output for optional relay
digitalWrite(RELAY, LOW); // LOW to turn relay off
Next, we initialize the TFT, setting it to a preferred orientation using the tft.setRotation function.
The void loop function is quite straight forward. We start by checking if the reader detects a tag. if this is so, the UID of the tag is read and it is checked with the pre-stored UID (blue_UID).
void loop() {
// only after successful transponder detection the reader will read the UID
// PICC = proximity integrated circuit card = wireless chip card
if (mfrc522.PICC_IsNewCardPresent() && mfrc522.PICC_ReadCardSerial() ) {
Serial.print("Gelesene UID:");
s1 = "";
for (byte i = 0; i < mfrc522uid.size; i++) {
// Abstand zwischen HEX-Zahlen und fhrende Null bei Byte < 16
s1 = s1 + (mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
s1 = s1 + String(mfrc522.uid.uidByte[i], HEX);
}
s1.toUpperCase();
Serial.println(s1);
// check current UID with blue_uid
blue_check = true;
for (int j=0; j<4; j++) {
if (mfrc522.uid.uidByte[j] != blue_uid[j]) {
blue_check = false;
}
}
If the check returns a true value (indicating a match), the granted screen (or any other action you desire for a positive match) is displayed via the function call, but if a false value is returned, the denied screen is displayed along with the tags UID. The loop is repeated and the process goes on and on.
if (blue_check)
{
Granted_Screen();
} else {
Denied_Screen(s1);
}
The Granted_Screen() function fetches a matching icon from the usergraphics.h file and displays it using the drawBitmap() function, while also displaying matching text and triggering the relay.
void Granted_Screen(){
// show symbol
tft.drawBitmap(0,50, access_granted,128,128,ILI9341_GREEN);
tft.setTextSize(0);
tft.setTextColor(ILI9341_WHITE);
tft.setFont(&FreeSansBold24pt7b);
tft.setCursor(140, 90 );
tft.println("Access");
tft.setCursor(140, 150);
tft.println("granted");
digitalWrite(TFT_LED, LOW); // LOW to turn backlight on
digitalWrite(RELAY, HIGH); // HIGH to turn relay on
tone(BEEPER,1000,800);
delay(1200);
digitalWrite(TFT_LED, HIGH); // HIGH to turn backlight off
tft.fillRect(0, 0, 320, 240, ILI9341_BLACK); // clear screen
digitalWrite(RELAY, LOW); // LOW to turn relay off
}
The same holds for the Denied_Screen() function. A matching icon is fetched and displayed along with text and that illustrates the Icon.
void Denied_Screen(String sUID) {
// show symbol
tft.drawBitmap(0,40, access_denied,128,128,ILI9341_RED);
// show result text
tft.setTextSize(0);
tft.setTextColor(ILI9341_WHITE);
tft.setFont(&FreeSansBold24pt7b);
tft.setCursor(140, 90 );
tft.println("Access");
tft.setCursor(140, 150);
tft.println("denied");
tft.setFont(&FreeSans9pt7b);
// show UID
tft.setCursor(90, 200);
tft.println("UID:");
tft.setCursor(140, 200);
tft.println(sUID);
digitalWrite(TFT_LED, LOW); // LOW to turn backlight on
for (int i=0;i< 3;i++) {
tone(BEEPER,4000);
delay(100);
noTone(BEEPER);
delay(50);
}
delay(1500);
digitalWrite(TFT_LED, HIGH); // HIGH to turn backlight off
tft.fillRect(0, 0, 320, 240, ILI9341_BLACK); // clear screen
}
The complete code for the project is provided below and also attached under the download section.
/*______Import Libraries_______*/
#include <Arduino.h>
#include <SPI.h>
#include <MFRC522.h>
#include "Adafruit_GFX.h"
#include "Adafruit_ILI9341.h"
#include <XPT2046_Touchscreen.h>
#include <Fonts/FreeSans9pt7b.h>
#include <Fonts/FreeSansBold9pt7b.h>
#include <Fonts/FreeSansBold24pt7b.h>
#include "usergraphics.h"
/*______End of Libraries_______*/
/*__Pin definitions for the Arduino MKR__*/
#define TFT_CS A3
#define TFT_DC 0
#define TFT_MOSI 8
#define TFT_CLK 9
#define TFT_MISO 10
#define TFT_LED A2
#define HAVE_TOUCHPAD
#define TOUCH_CS A4
#define TOUCH_IRQ 1
#define BEEPER 2
#define RELAY A0 // optional relay output
// RFID
#define RST_PIN 6 // SPI Reset Pin
#define SS_PIN 7 // SPI Slave Select Pin
/*_______End of definitions______*/
/*____Calibrate Touchscreen_____*/
#define MINPRESSURE 10 // minimum required force for touch event
#define TS_MINX 370
#define TS_MINY 470
#define TS_MAXX 3700
#define TS_MAXY 3600
/*______End of Calibration______*/
/*___Keylock spezific definitions___*/
byte blue_uid[] = {0x09, 0x8D, 0x9D, 0xA3};
#define relay_on_time 30 // will set the relay on for 3s
/*___End of Keylock spezific definitions___*/
Adafruit_ILI9341 tft = Adafruit_ILI9341(TFT_CS, TFT_DC);
XPT2046_Touchscreen touch(TOUCH_CS);
MFRC522 mfrc522(SS_PIN, RST_PIN);
int X,Y;
long Num1,Num2,Number;
char action;
boolean result = false;
bool Touch_pressed = false;
TS_Point p;
int RELAYTMR = 0; // Timer for relay control
int blue_check = false;
int red_check = false;
String s1;
void setup() {
Serial.begin(115200); //Use serial monitor for debugging
pinMode(TFT_LED, OUTPUT); // define as output for backlight control
pinMode(RELAY, OUTPUT); // define as output for optional relay
digitalWrite(RELAY, LOW); // LOW to turn relay off
Serial.println("Init TFT and Touch...");
tft.begin();
touch.begin();
tft.setRotation(3);
Serial.print("tftx ="); Serial.print(tft.width()); Serial.print(" tfty ="); Serial.println(tft.height());
tft.fillScreen(ILI9341_BLACK);
digitalWrite(TFT_LED, HIGH); // HIGH to turn backlight off - will hide the display during drawing
Serial.println("Init RFC522 module....");
mfrc522.PCD_Init(); // Init MFRC522 module
}
void loop() {
// only after successful transponder detection the reader will read the UID
// PICC = proximity integrated circuit card = wireless chip card
if (mfrc522.PICC_IsNewCardPresent() && mfrc522.PICC_ReadCardSerial() ) {
Serial.print("Gelesene UID:");
s1 = "";
for (byte i = 0; i < mfrc522.uid.size; i++) {
// Abstand zwischen HEX-Zahlen und fhrende Null bei Byte < 16
s1 = s1 + (mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ");
s1 = s1 + String(mfrc522.uid.uidByte[i], HEX);
}
s1.toUpperCase();
Serial.println(s1);
// check current UID with blue_uid
blue_check = true;
for (int j=0; j<4; j++) {
if (mfrc522.uid.uidByte[j] != blue_uid[j]) {
blue_check = false;
}
}
if (blue_check)
{
Granted_Screen();
} else {
Denied_Screen(s1);
}
}
}
/********************************************************************//**
* @brief detects a touch event and converts touch data
* @param[in] None
* @return boolean (true = touch pressed, false = touch unpressed)
*********************************************************************/
bool Touch_Event() {
p = touch.getPoint();
delay(1);
#ifdef touch_yellow_header
p.x = map(p.x, TS_MINX, TS_MAXX, 320, 0); // yellow header
#else
p.x = map(p.x, TS_MINX, TS_MAXX, 0, 320); // black header
#endif
p.y = map(p.y, TS_MINY, TS_MAXY, 0, 240);
if (p.z > MINPRESSURE) return true;
return false;
}
/********************************************************************//**
* @brief shows the intro screen in setup procedure
* @param[in] None
* @return None
*********************************************************************/
void IntroScreen()
{
//Draw the Result Box
tft.fillRect(0, 0, 240, 320, ILI9341_WHITE);
tft.drawRGBBitmap(20,80, Zihatec_Logo,200,60);
tft.setTextSize(0);
tft.setTextColor(ILI9341_BLACK);
tft.setFont(&FreeSansBold9pt7b);
tft.setCursor(42, 190);
tft.println("ArduiTouch MKR");
tft.setCursor(55, 215);
tft.println("RFID example");
}
/********************************************************************//**
* @brief shows the granted screen on tft & switch optional relay
* @param[in] None
* @return None
*********************************************************************/
void Granted_Screen(){
// show symbol
tft.drawBitmap(0,50, access_granted,128,128,ILI9341_GREEN);
tft.setTextSize(0);
tft.setTextColor(ILI9341_WHITE);
tft.setFont(&FreeSansBold24pt7b);
tft.setCursor(140, 90 );
tft.println("Access");
tft.setCursor(140, 150);
tft.println("granted");
digitalWrite(TFT_LED, LOW); // LOW to turn backlight on
digitalWrite(RELAY, HIGH); // HIGH to turn relay on
tone(BEEPER,1000,800);
delay(1200);
digitalWrite(TFT_LED, HIGH); // HIGH to turn backlight off
tft.fillRect(0, 0, 320, 240, ILI9341_BLACK); // clear screen
digitalWrite(RELAY, LOW); // LOW to turn relay off
}
/********************************************************************//**
* @brief shows the access denied screen on tft
* @param[in] None
* @return None
*********************************************************************/
void Denied_Screen(String sUID) {
// show symbol
tft.drawBitmap(0,40, access_denied,128,128,ILI9341_RED);
// show result text
tft.setTextSize(0);
tft.setTextColor(ILI9341_WHITE);
tft.setFont(&FreeSansBold24pt7b);
tft.setCursor(140, 90 );
tft.println("Access");
tft.setCursor(140, 150);
tft.println("denied");
tft.setFont(&FreeSans9pt7b);
// show UID
tft.setCursor(90, 200);
tft.println("UID:");
tft.setCursor(140, 200);
tft.println(sUID);
digitalWrite(TFT_LED, LOW); // LOW to turn backlight on
for (int i=0;i< 3;i++) {
tone(BEEPER,4000);
delay(100);
noTone(BEEPER);
delay(50);
}
delay(1500);
digitalWrite(TFT_LED, HIGH); // HIGH to turn backlight off
tft.fillRect(0, 0, 320, 240, ILI9341_BLACK); // clear screen
}
/********************************************************************//**
* @brief plays ack tone (beep) after button pressing
* @param[in] None
* @return None
*********************************************************************/
void Button_ACK_Tone(){
tone(BEEPER,4000,100);
}
Demo
With the code complete, connect the MKR board to your computer and upload the code. To pre-store a UID, place it on the reader and write down the displayed ID on the Access Denied page as shown below.
Demo – Access Denied
Assign this value to the blue_uid variable at the top of the code and re-upload the code to the MKR. The card with the Blue UID should now get an “Access Granted” response while others will get an “Access denied“response.
Demo – Access Granted
That’s it for this project, thanks for reading. Yes definitely, the first thing you should do as an upgrade to the project is to create an enroll sketch to allow you add multiple “blue_uids” and then maybe connect the project to the internet to get live updates on who just accessed the door. The project is quite fun and it demonstrates the ease with which you can build really cool looking projects using the ArduiTouch Enclosures.
Feel free to reach me via the comment section if you have any questions as regards replicating the project.
In search for a compact and reliable LiDAR solution, researchers from Yokohama National University in Japan have developed a waveguide-based photonic chip that takes a laser beam as an input and steers light beams over a wide range of selectable angles, without involving any moving parts, not even MEMS. by Julien Happich @ eenewseurope.com
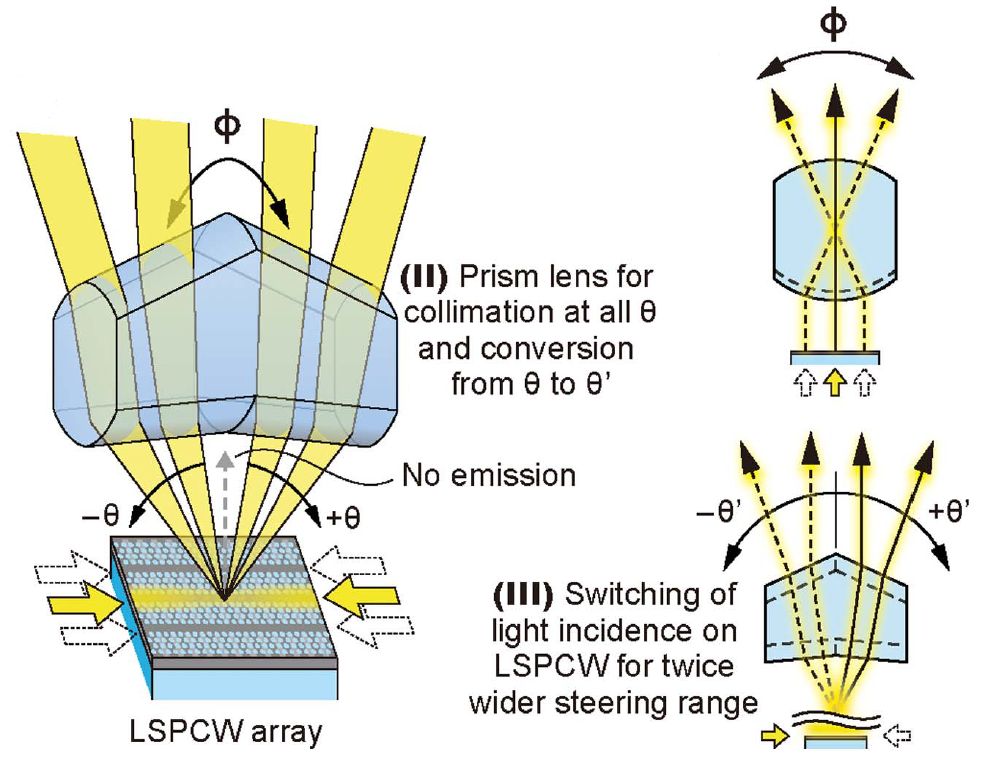
Their results published in the Optica journal under the title “Wide beam steering by slow-light waveguide gratings and a prism lens” describe the use of so-called slow light modes achieved in a specially designed array of silicon-based lattice-shifted photonic crystal waveguides (LSPCW). Thanks to the integration of a six-stage TO Mach–Zehnder Si wire optical switch connected to each of the LSPCWs, the researchers demonstrated the selective light emission at discrete points of the lattice, which they could collimate thanks to a specially designed prism lens.
2D beam steering using the LSPCW array in combination with a purposely designed prism lens that maintains the output beam collimated regardless of the selected angle of incidence.
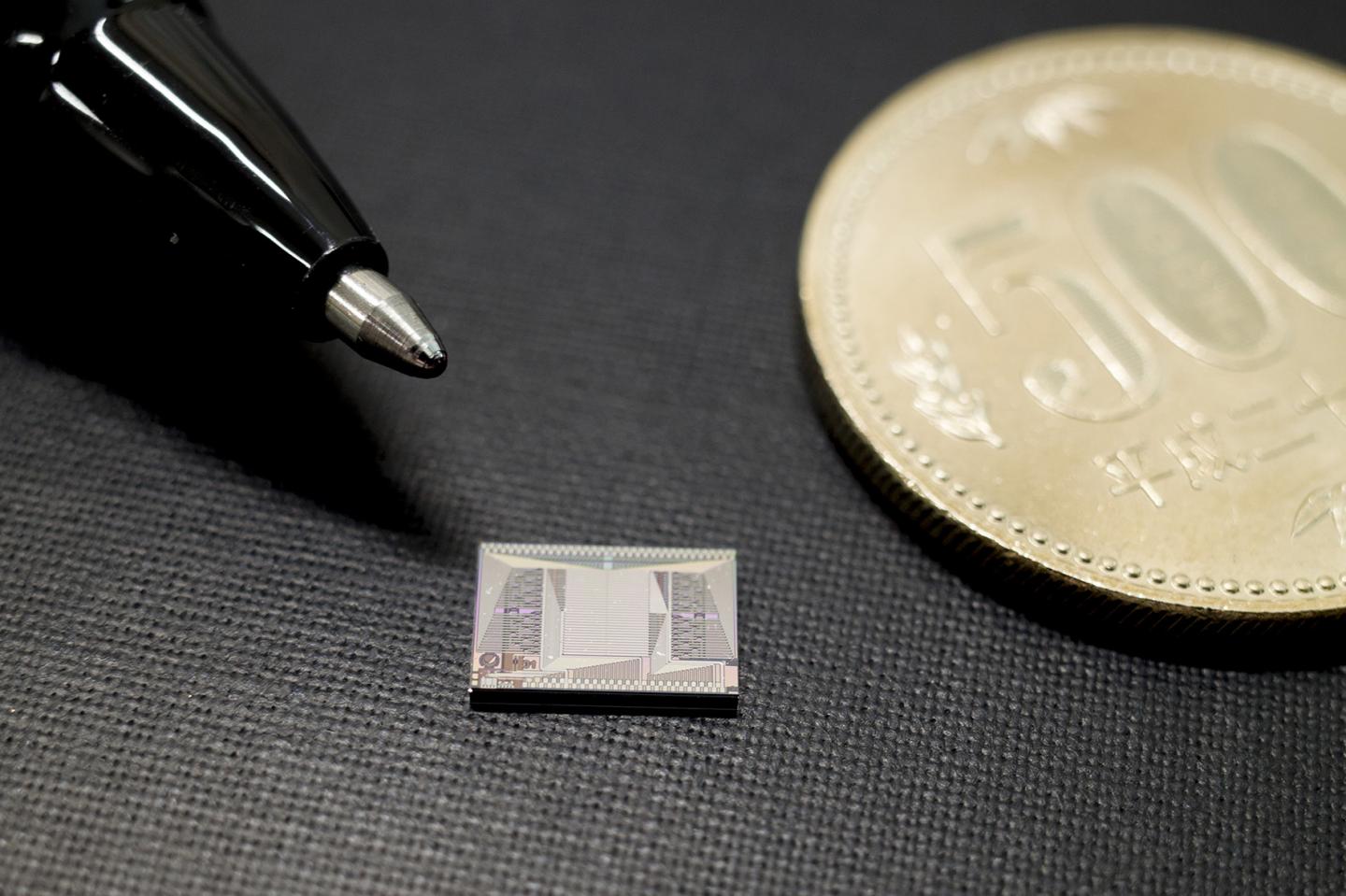
Measuring only a few millimeters square, the silicon photonic chip was fabricated in a CMOS process. In combination with the fixed prism, it was able to perform continuous beam steering over a 40×4.4º field of view. In their discussion, the authors anticipate that their device could be further miniaturized, increasing the number of resolution points from 4256 for the prototype they tested in the lab to 345,600 while also increasing the field of view of their LiDAR with the same device footprint.
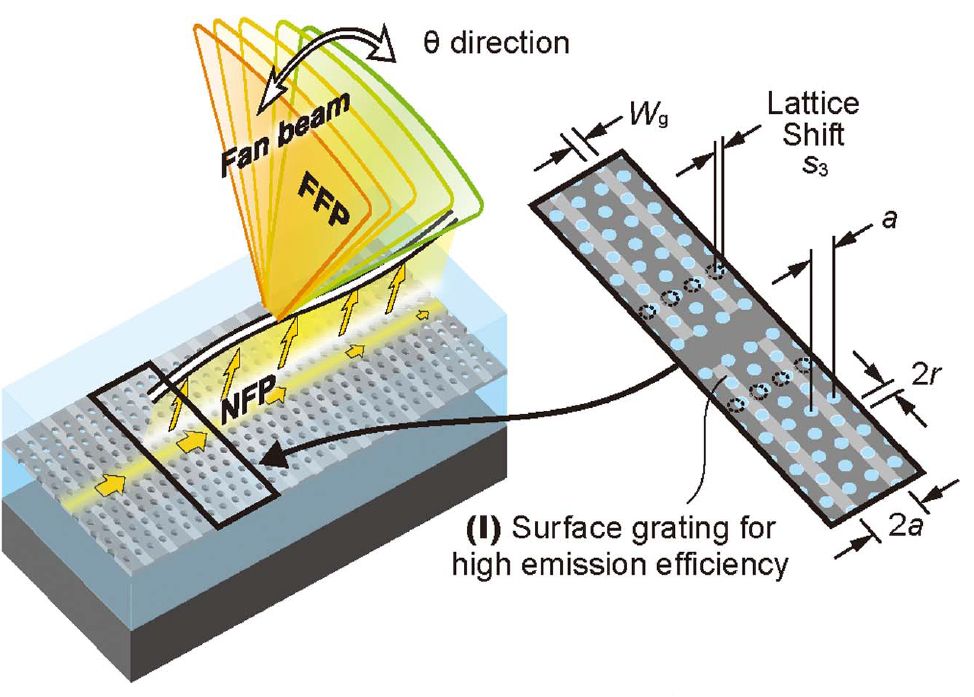
The lattice-shifted photonic crystal waveguide (LSPCW) with shallow grating which improves the upper emission intensity.
Such a device would be smaller and cheaper and more rugged than any LiDAR alternative using mechanical beam steering. It would also be more energy efficient than other solid-state LiDAR approaches proposed so far, relying on optical phased arrays (OPAs) which require complex optical phase control and a trade-off between the steering range, resolution, and efficiency.
The researchers have applied for patents, not only in Japan but in other countries with the aim to commercialize the technology for its integration into LiDARs.
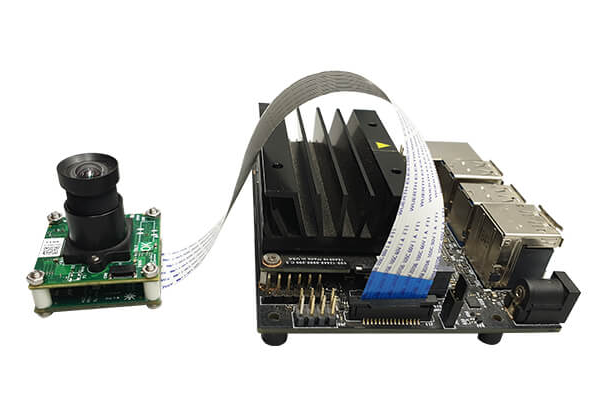
As a preferred camera partner of NVIDIA®, e-con Systems is introducing yet another camera support for NVIDIA® platforms. e-con Systems have launched the support for one of our popular low-light, 5 MP camera based on OnSemi’s AR0521 – e-CAM50_CUNANO, with NVIDIA® Jetson Nano developer kit.
e-con Systems Inc., NVIDIA®’s preferred camera partner and a leading embedded camera solution company, today announced the launch of e-CAM50_CUNANO for NVIDIA® Jetson Nano developer kit. e-CAM50_CUNANO is based on OnSemi’s 1/2.5″ AR0521, a 2.2 µm pixel CMOS image sensor with integrated Image Signal Processor (ISP).
e-CAM50_CUNANO is capable of streaming HD (1280 x 720) at 100 fps, FHD (1920 x 1080) at 65 fps and 5 MP (2592 x 1944) at 25 fps in uncompressed (UYVY). The higher Signal to Noise Ratio (SNR) supported by this camera helps to produce clear images without noise and a better dynamic range helps in retaining more details in shadows and highlights. Along with these features, the powerful in-built ISP helps to bring out the best-in-class video in uncompressed UYVY format. The camera is also provided with the S-mount (M12) lens holder that enables customers to choose the lens from a wide range of options as per their requirements.
e-CAM50_CUNANO
Jetson Nano is a small, powerful and cost-effective platform for applications such as image classification, object detection, segmentation, and speech processing. It offers a framework for real-time computer vision and robotics applications. These applications require a camera with uncompromising image quality and performance, which is why e-con Systems came up with e-CAM50_CUNANO.
Video
Availability
e-CAM50_CUNANO is currently available for evaluation. Customers interested in evaluating e-CAM50_CUNANO can order samples from e-con Systems’ online store.
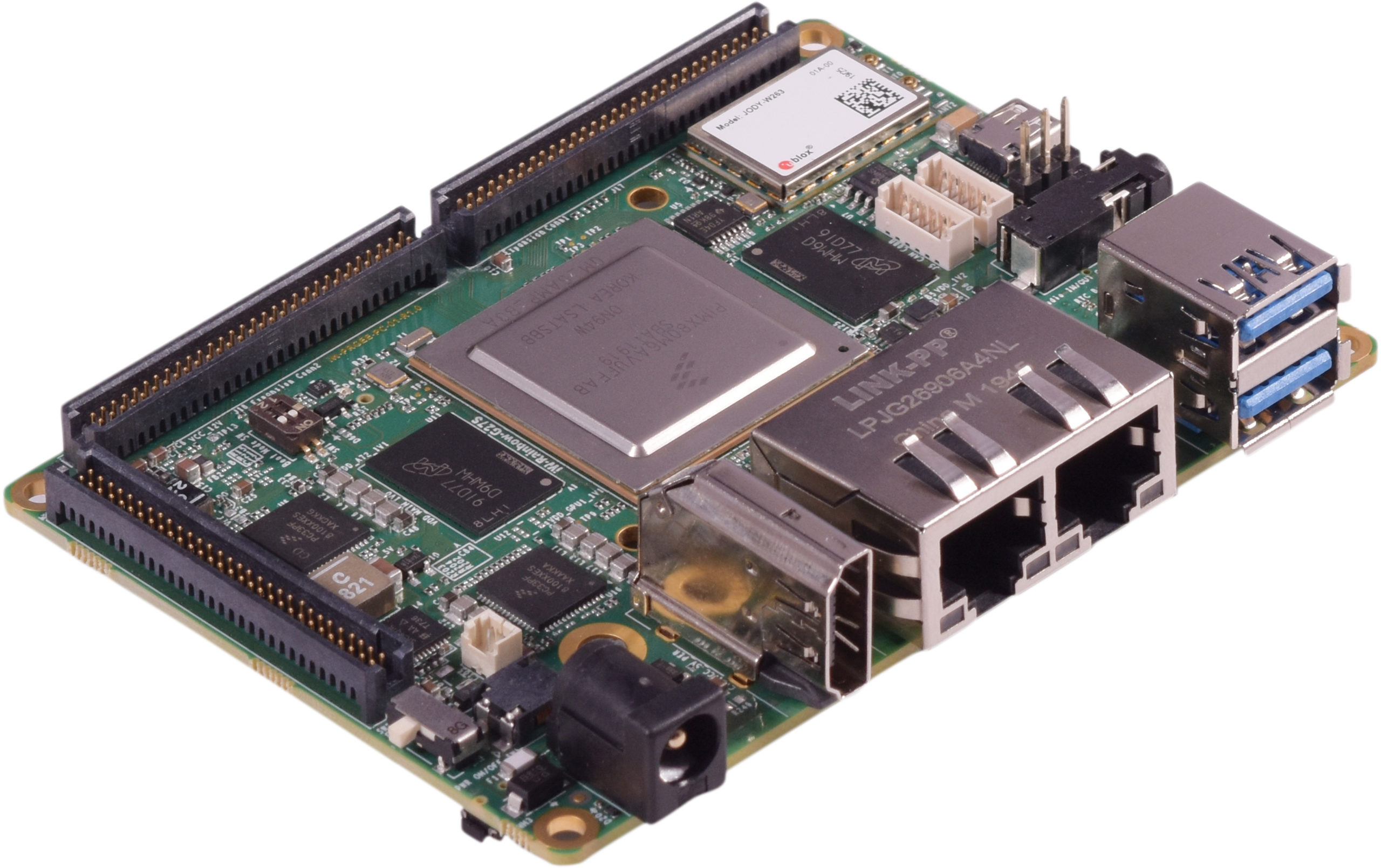
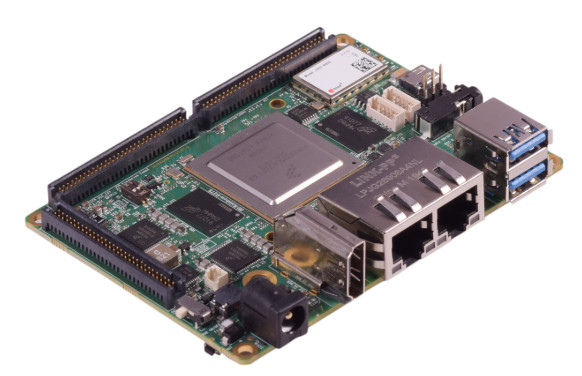
iWave’s “iW-Rainbow-G27S” Pico-ITX SBC runs Linux or Android on an i.MX8 QuadPlus or QuadMax with up to 8GB LPDDR4, 2x GbE, 2x USB 3.0, 802.11ac/BT, M.2, HDMI in and out, and -40 to 85°C support. [via]
The i.MX8 Quad MAX/Quad Plus Pico ITX SBC integrates Dual Cortex A72 + Quad Cortex A53 Cores, Dual GPU systems, 4K H.265 capable VPU dual failover-ready display controller based i.MX8 QuadMax SoC with on SOM Dual 10/100/1000 Mbps Ethernet PHY,USB 3.0 hub and IEEE 802.11a/b/g/n/ac Wi-Fi & Bluetooth 5.0 module.
This board offers maximum performance with higher efficiency for complex consumer, medical and industrial embedded computing applications. With the 100mm x 72mm Pico-ITX form factor, the SBC is highly packed with all the necessary onboard connectors.
iW-Rainbow-G27S SBC
Highlights:
Dual Complex Core System:
Complex 1: 4 x Cortex-A53 @ 1.2 GHz
Complex 2: 2 x Cortex-A72 @ 1.8 GHz
2 x Cortex-M4F @ 266 MHz for advanced system control
Operating system — Linux 4.14.98; Android Pie 9.0.0; QNX 7.0.0; Xen
No pricing or availability information was provided for the iW-Rainbow-G27S. More information may be found in iWave’s announcement and the iW-Rainbow-G27S product page.
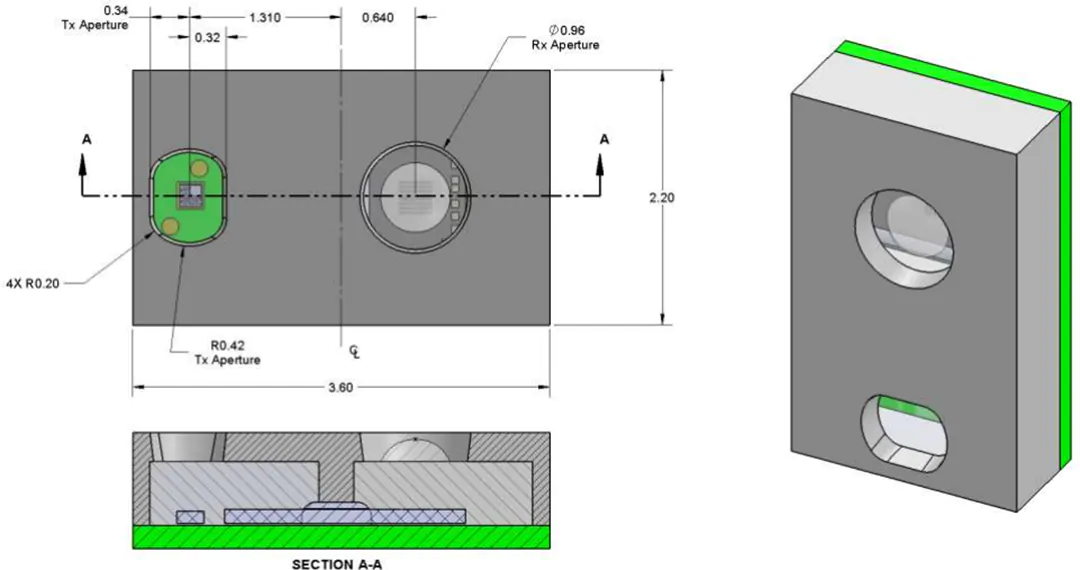
The TMF8801 is a robust true direct time-of-flight (ToF) sensor system.
The TMF8801 is a robust true direct time-of-flight (ToF) sensor system that offers highly accurate depth accuracy detection through a sub-nanosecond light pulse and an antialiasing “stop-watch” method to measure round-trip time of pulse. It provides single-zone detection of an object, regardless of the color, reflectivity, and texture of the object.
An integrated microcontroller is featured with all algorithms included on-chip with no need for external optics. Ultra-compact technology use is featured through the industry‘s smallest modular package size of 2.2 x 3.6 x 1.0 mm.
Key features
20 to 250 cm distance measurement
True Direct Time-of-Flight Measurement
Fast Compact Time-To-Digital Converters
High Accuracy Distance Measurement (5%) – 1 mm Resolution
Additional features:
Single-photon avalanche diode detection
Sub-nanosecond (< 500 psec) light pulse driver
Histogram based architecture
SoC with integrated micro-controller – all algorithms on-chip
Dynamic cover glass calibration
Dirt/smudge cover glass detection and compensation
Sunlight on-chip rejection filter and algorithm
940 nm VCSEL Class 1 Eye Safety
32 mA active mode current consumption at 30 Hz
I2C fast-mode compatible interface
Modular OLGA package with lens – 2.2 x 3.6 x 1.0 mm
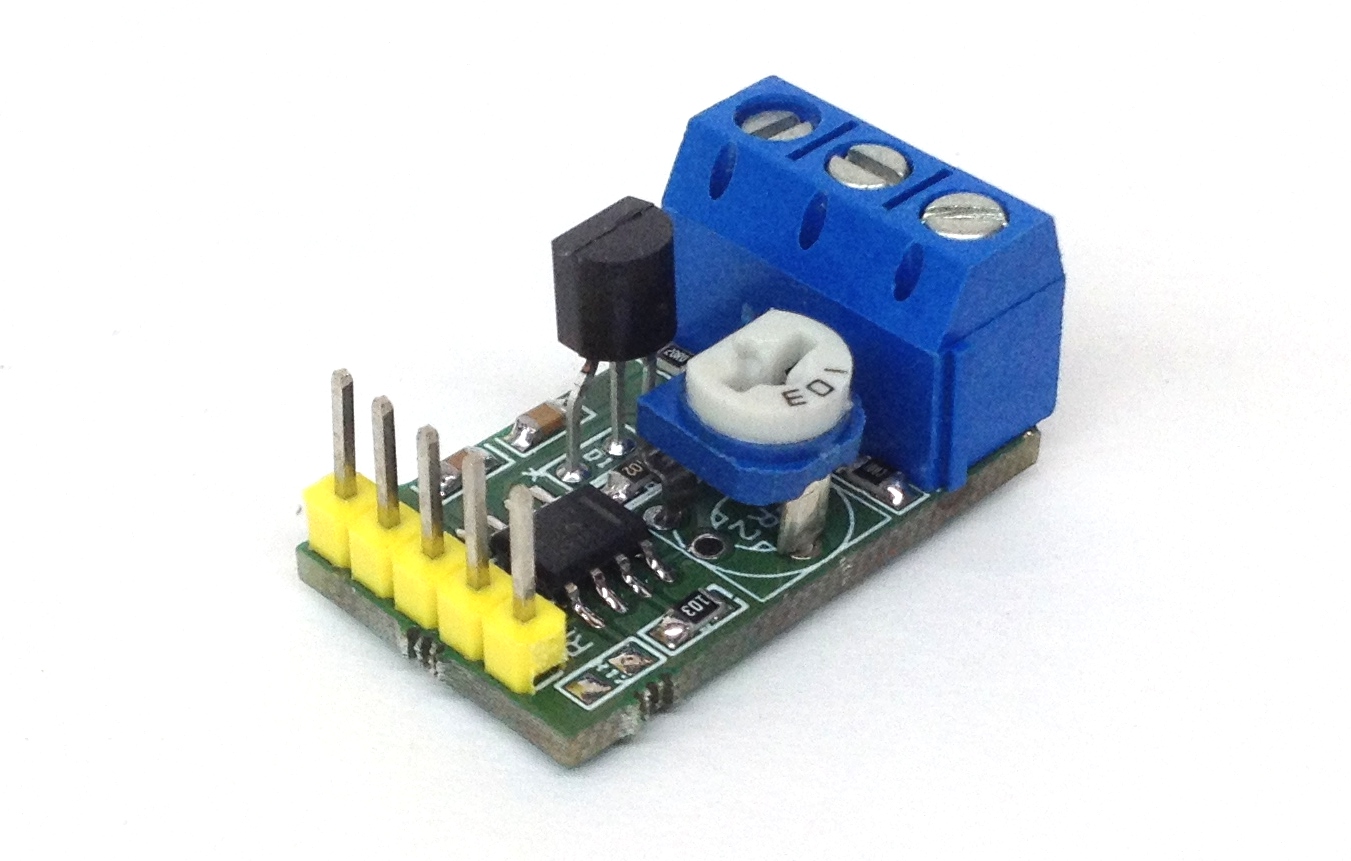
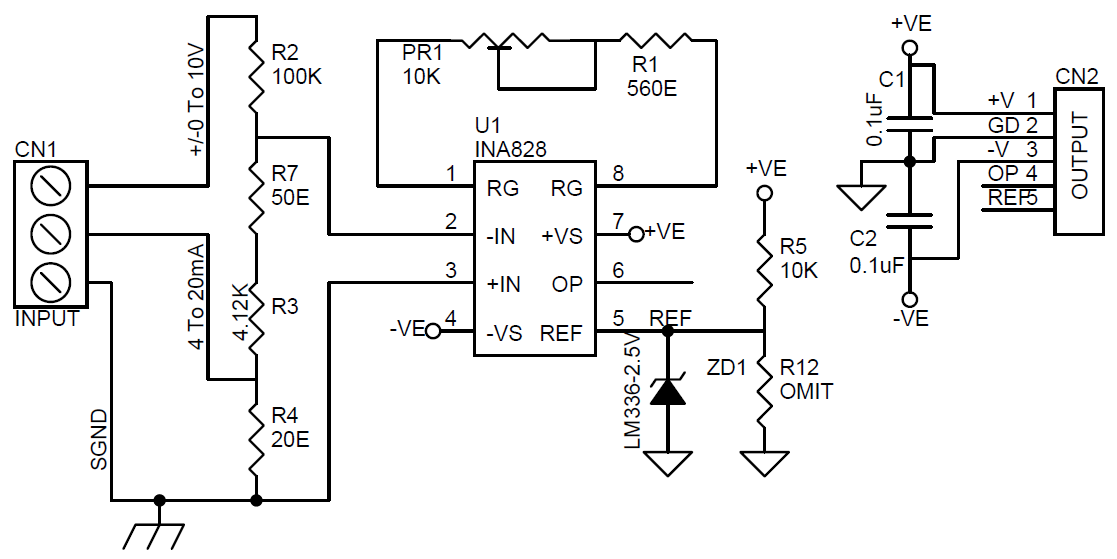
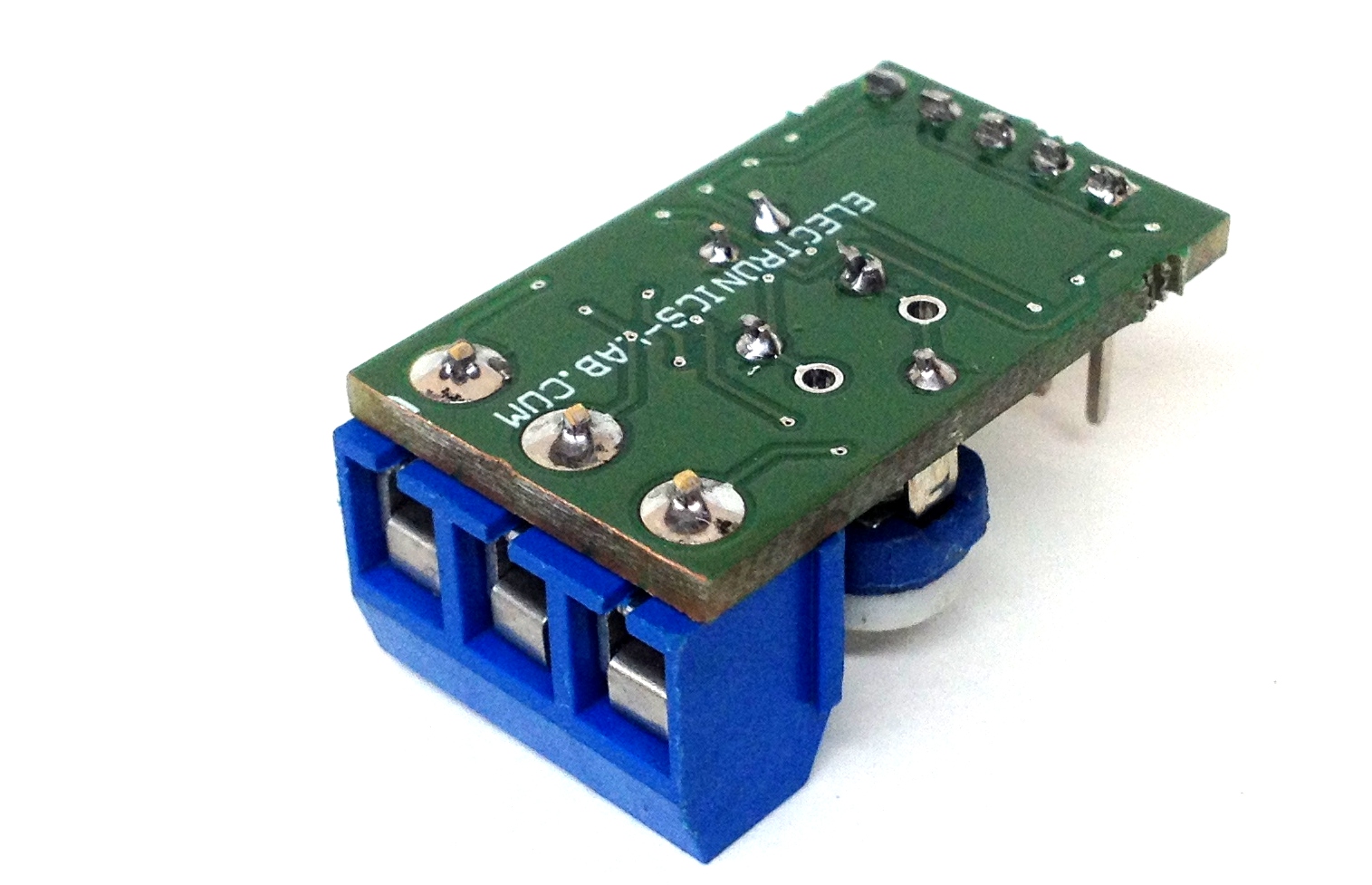
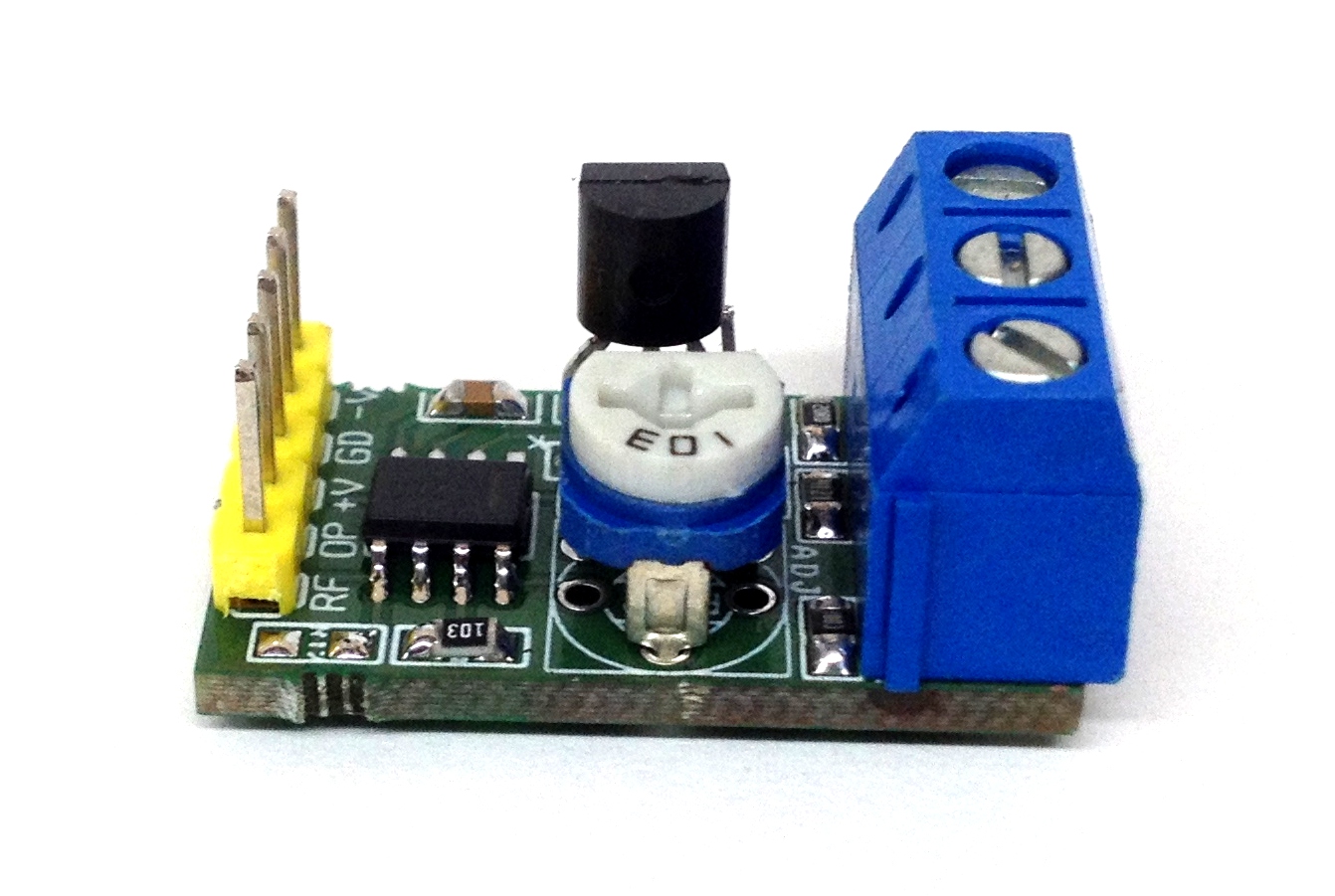
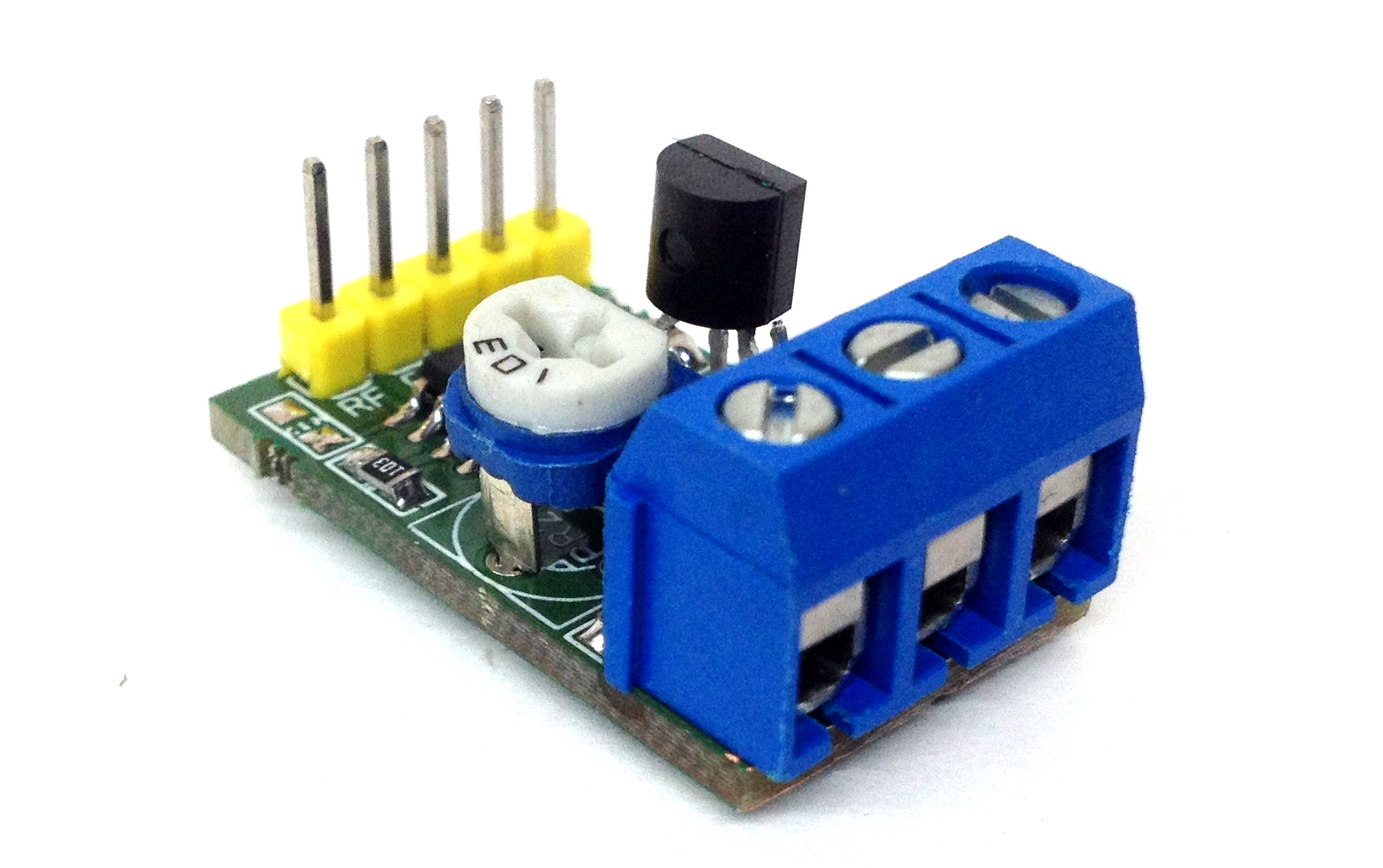
This is an analog input module that helps to digitalize temperature, current (4-20mA) and voltage (±10V) for PLC and Microcontrollers input. This analog module can be used for Programmable Logic Control (PLC), Programmable Automation Control (PAC) and Discrete Control System (DCS). The module has three input terminals. This PLC input accepts inputs of ±10 V or ±20 mA. The output is a single-ended voltage of 2.5 V ±2.3 V (or 200 mV to 4.8 V). Many PLCs typically have this input and output ranges. PR1 Trimmer potentiometer provided to fine trim the gain. Ideally, PR1 + R1 value should be 10.5Khoms. The circuit works with dual supply +/-15V DC. The circuit is cutesy of Texas instruments from the INA828 datasheet.
Features
Supply +/-15V DC
4-mA to 20-mA input with less than 20-Ω burden
±20-mA input with less than 20-Ω burden
±10-V input with an impedance of approximately 100 kΩ
Output range within 0 V to 5 V
Maximum 4-mA to 20-mA or ±20-mA burden voltage equal to ±0.4 V
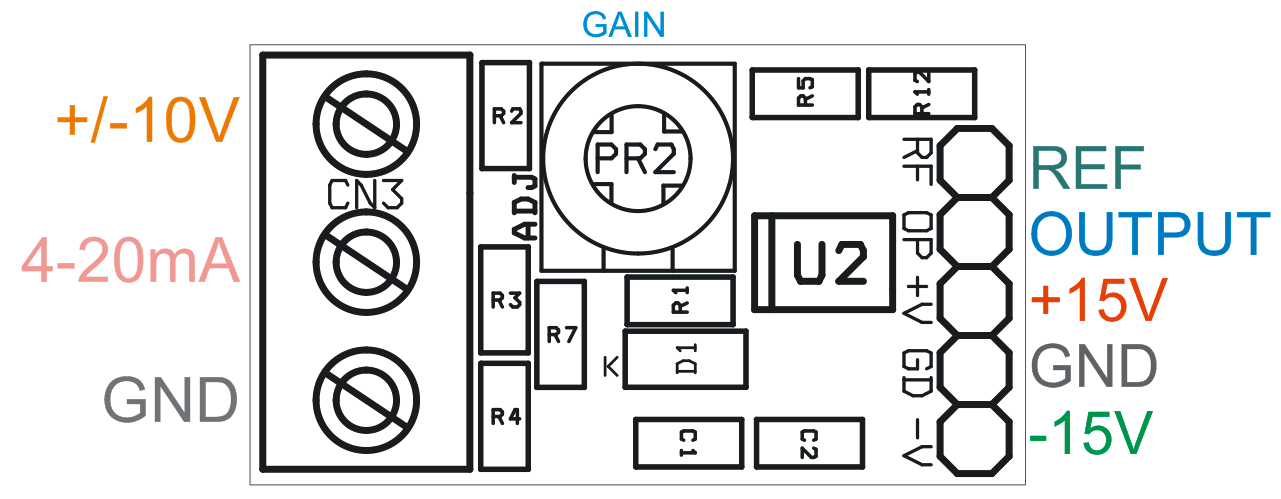
PCB Dimensions 27.87 mm x 15.59 mm
4-20mA / ±10V Analog Input Module for PLC – [Link]
This is an analog input module that helps to digitalize temperature, current (4-20mA) and voltage (±10V) for PLC and Microcontrollers input. This analog module can be used for Programmable Logic Control (PLC), Programmable Automation Control (PAC) and Discrete Control System (DCS). The module has three input terminals. This PLC input accepts inputs of ±10 V or ±20 mA. The output is a single-ended voltage of 2.5 V ±2.3 V (or 200 mV to 4.8 V). Many PLCs typically have this input and output ranges. PR1 Trimmer potentiometer provided to fine trim the gain. Ideally, PR1 + R1 value should be 10.5Khoms. The circuit works with dual supply +/-15V DC. The circuit is from Texas instruments INA828 datasheet.
Features
Supply +/-15V DC
4-mA to 20-mA input with less than 20-Ω burden
±20-mA input with less than 20-Ω burden
±10-V input with an impedance of approximately 100 kΩ
Output range within 0 V to 5 V
Maximum 4-mA to 20-mA or ±20-mA burden voltage equal to ±0.4 V