RS has launched the first digital multimeter (DMM) in the company’s RS PRO product range to integrate a built-in thermal imager. by Ally Winning@ www.eenewsembedded.com
The RS-9889 thermal imaging multimeter allows the identification of thermal overload issues in electrical equipment without the need for any physical contact. It is a handheld device designed to be cost-effective, while still being durable and reliable. The RS-9889 measures 80 x 58 x 195mm and weighs 540g.
The thermal imager of the RS-9889 offers maximum, minimum and centre crosshair targeting. A BLE connection allows the sharing of thermal images through the Thermview+ app. The imager has a 2.8-inch colour TFT LCD screen with an infrared resolution of 80 x 80 pixels, a 21° x 21° field of view, thermal sensitivity (NETD or noise equivalent temperature difference) to less than 0.1°C/100mK, a fast 50 Hz thermal image frame rate, an object temperature range from 20° to 260°C, a spectral range of 8–14 μm, and accuracy to within ±2°C, or ±2% of the reading.
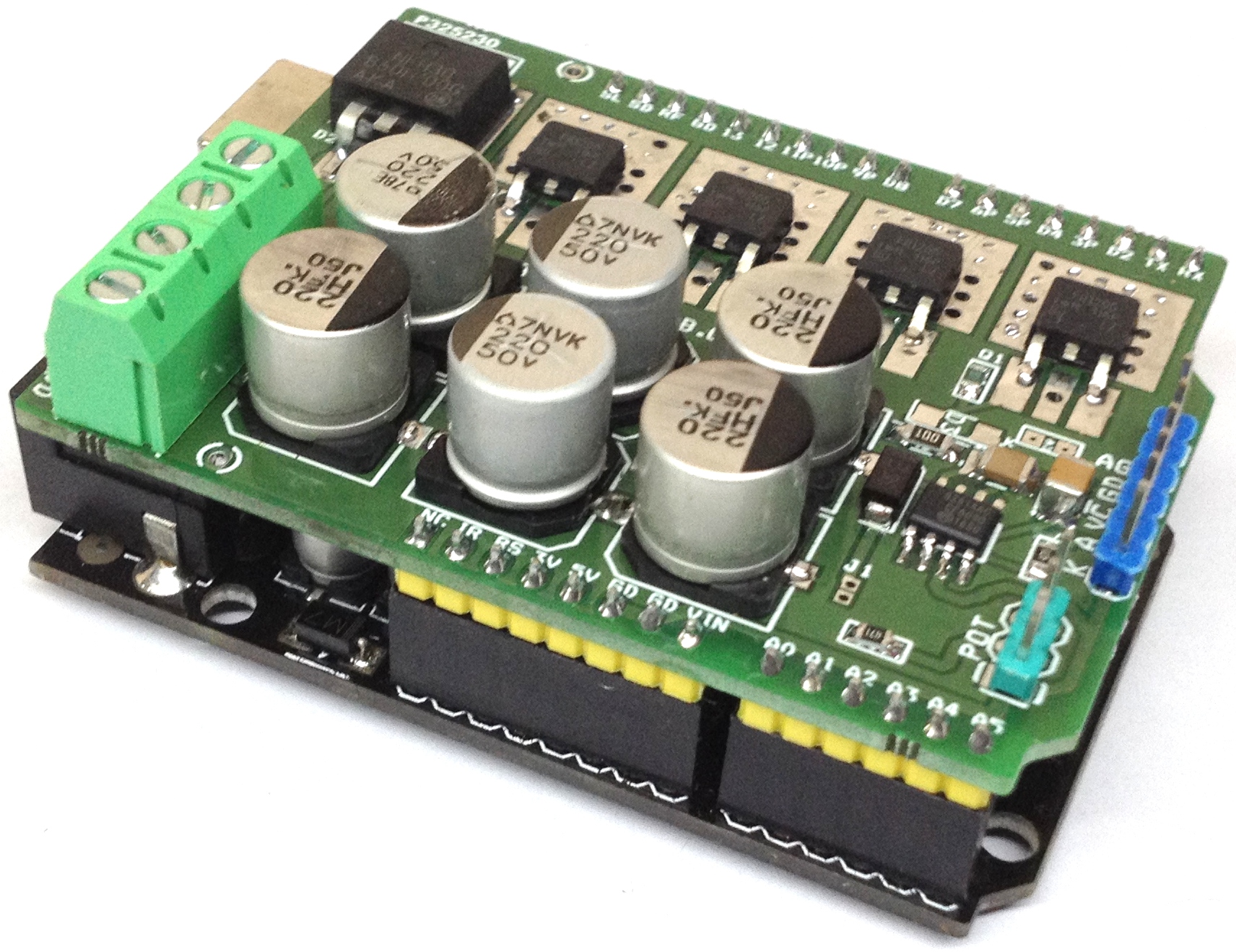
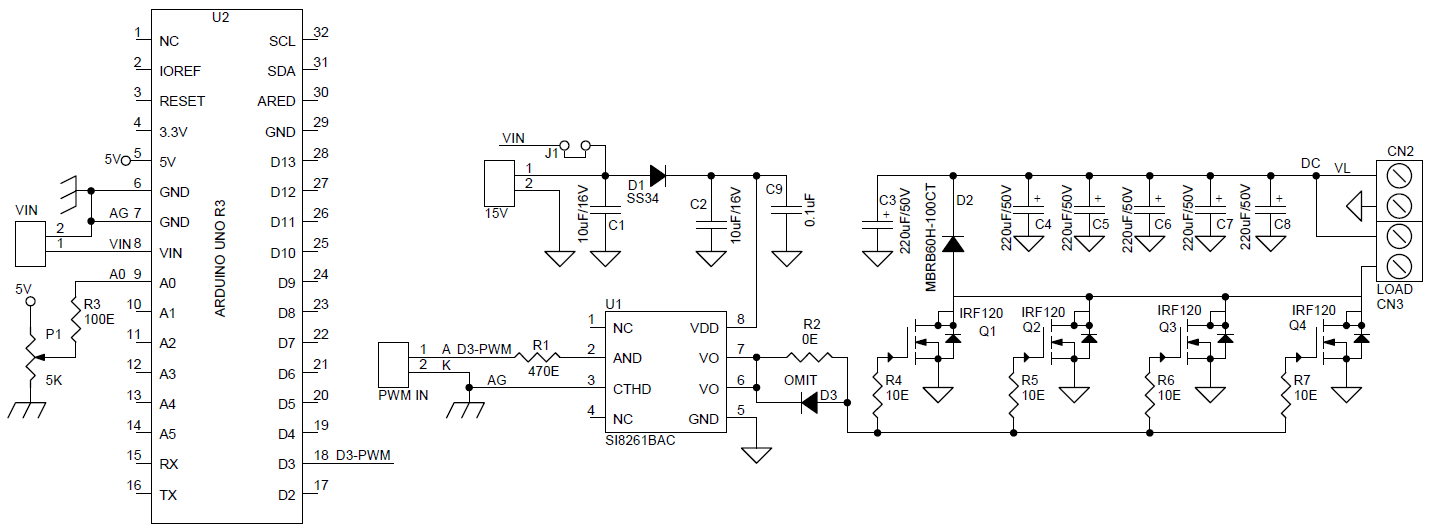
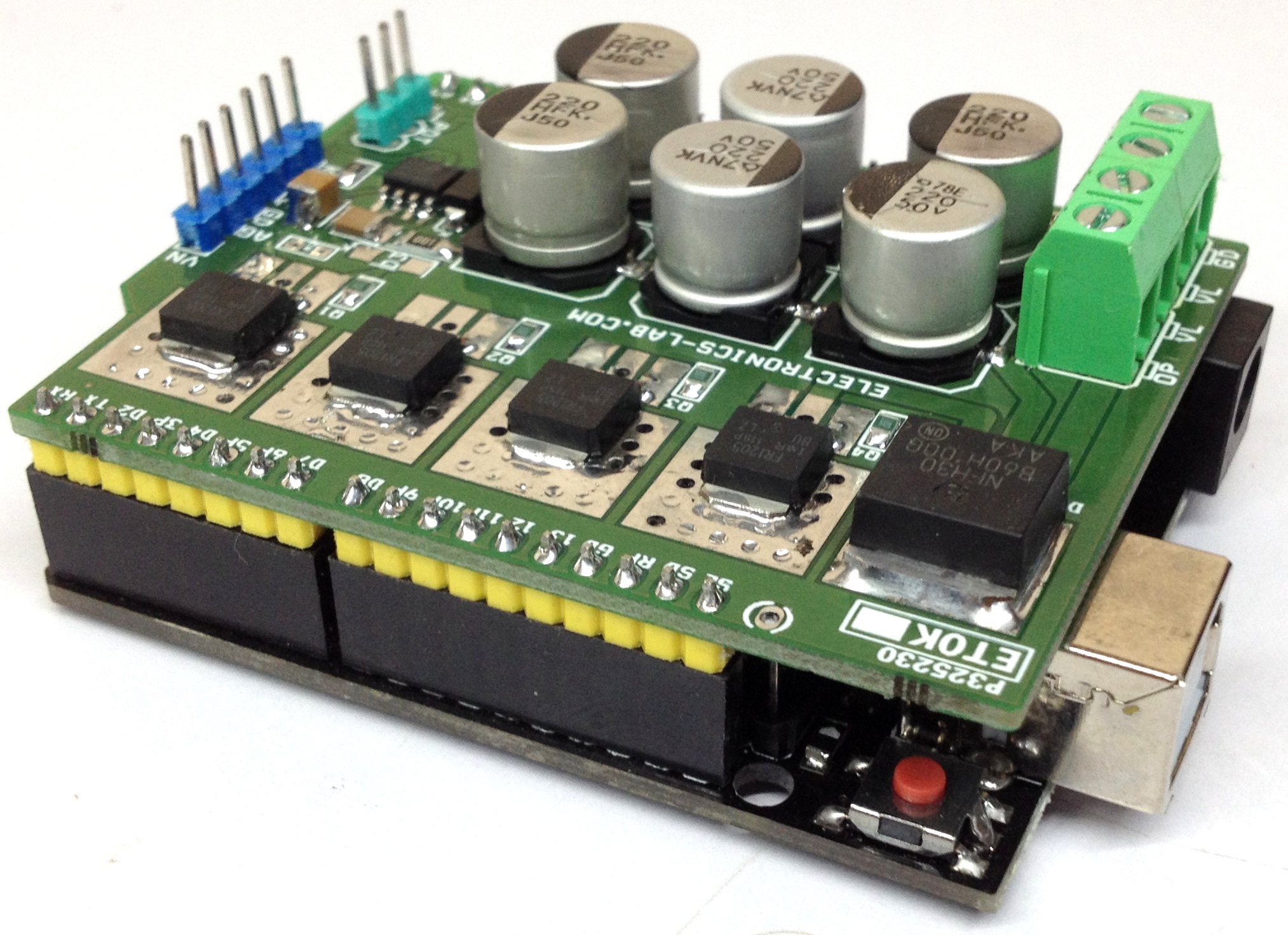
Isolated high power Mosfet DC solid state relay shield allows you to control high current DC load in switching or PWM control mode. The project can be used in wide verity of applications like DC-DC Converters, inverters, DC motor control, solenoid, LED Dimmer, battery chargers and it can control inductive and resistive loads. On board high current fast recovery diode across the load provided for back EMF protection. The board can control load up to 25A with input supply up to 48V DC. High voltage DC input supply up to 90V is possible by altering DC bus capacitor voltage. Input PWM frequency up to 100 KHz duty cycle 0-100%. Mosfet power driver is isolated from Gate driver input. Gate driver circuitry requires 15V DC. Load supply 15V to 48V DC. Jumper J1 helps to use common supply for Arduino and gate driver. Screw terminal CN3 helps to connect load supply and load. Anode of gate driver connected to D3-PWM pin of Arduino to feed PWM signal or ON/OFF. P1 Potentiometer connected to Analog pin A0 of Arduino to adjust the PWM. Higher current Mosfets can be used to get more output current. Gate input requires TTL level signal.
Feature
Gate Driver Supply 15V
Load Supply 15V-48V
Load Current 25Amps
PWM Control: Arduino D3-PWM Pin
Potentiometer: Arduino Analog Pin A0
Jumper J1 : Close If common supply Arduino + Gate Driver
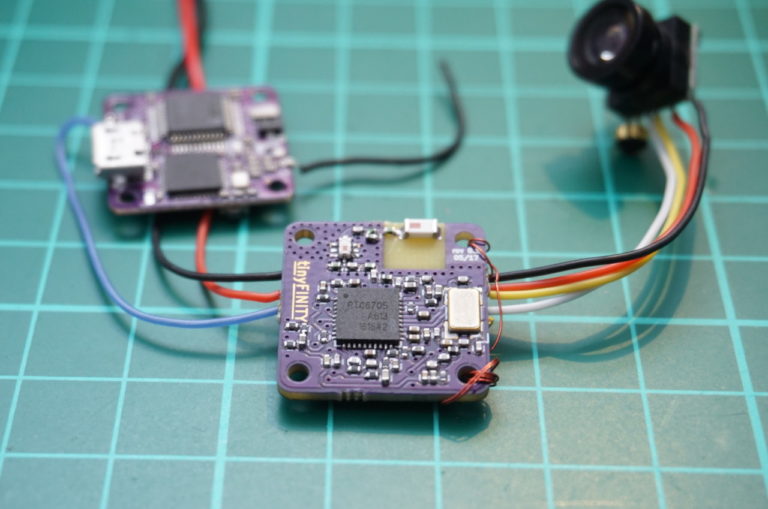
This is a tiny open source video transmitter with integrated graphic OSD from Simon Schulz @ fishpepper.de
Some time ago I got annoyed by the available OSD solutions and I started to look for alternatives. Nowadays small micro controllers are fast enough and include fancy features like DMA so that the OSD generation can be handled in software. I selected a STM32F3 due to the availability in small packages and the necessary features I needed and got working. In May 2017 I posted a first preview of my tinyOSD development on my blog. That time it was running on a tiny PCB and was meant to be inserted between your camera and video transmitter. I got up to a point where I had integrated full communication into a modified betaflight firmware and could do all kinds of fancy animations:
tinyOSD & tinyFINITY – a tiny opensource video tx with full graphic OSD – [Link]
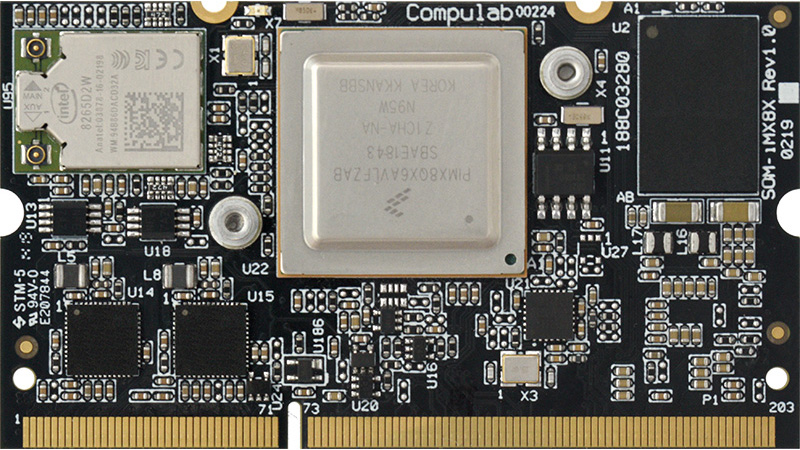
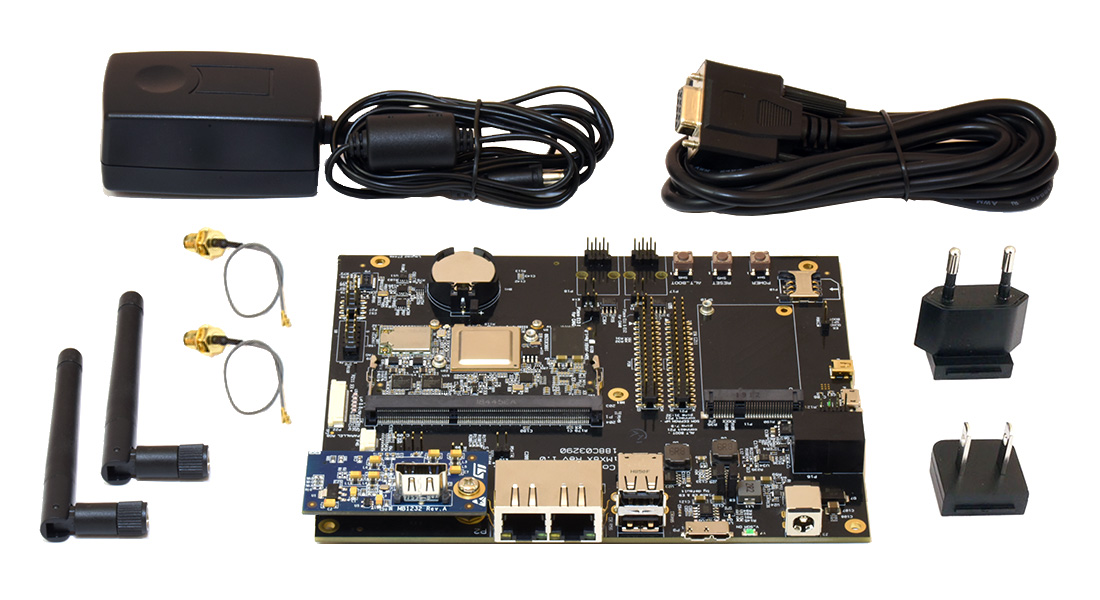
CompuLab introduces CL-SOM-iMX8X – a miniature System-on-Module built around the NXP i.MX8X System-on-Chip family.
High performance, powerful graphics and extensive connectivity make CL-SOM-iMX8X an excellent solution for a very wide range of applications such as industrial HMI, building control, image processing systems, IoT gateways, medical devices and metering systems.
CL-SOM-iMX8X has been designed to bring out the full I/O capabilities of the highly versatile i.MX8X SoC. Peripheral interfaces include PCI Express, dual Gigabit Ethernet, USB ports, 4 UARTs, 3 CAN-FD ports and 96 GPIOs. Display connectivity is supported with two independent LVDS / MIPI-DSI interfaces. In addition, CL-SOM-iMX8X extends the i.MX8X I/O even further with on-board 802.11ac WiFi, Bluetooth 4.2 and 3 additional USB ports.
CL-SOM-iMX8X is offered with full industrial temperature range of -40C to 85C.
Software Support
CL-SOM-iMX8X is provided with a full BSP and ready-to-run images for the Linux operating system. The CL-SOM-iMX8X BSP includes Linux kernel 4.14, Yocto Project SDK and U-Boot boot-loader.
Evaluation and Design Support
To facilitate streamlined and rapid product development, CL-SOM-iMX8X is supported with the SB-iMX8X carrier-board and EVAL-iMX8X evaluation kit.
SB-iMX8X carrier-board has been designed for CL-SOM-iMX8X evaluation and application development. SB-iMX8X schematics, bill of materials and layout are available to be used as a reference design for a wide range of industrial use cases.
The EVAL-iMX8X eval-kit offered at $395, includes CL-SOM-iMX8X and SB-iMX8X hardware set, an optional LCD panel, PSU, cables and a technical support contract.
Feature Highlights
Up to 4GB LPDDR4 and 64GB eMMC
2x MIPI-DSI / LVDS, up-to 1080p60
2x GbE, WiFi 802.11ac, BT 4.2
mini-PCIe, 3x USB2.0, 2x CAN, RS485
Price and Availability
CL-SOM-iMX8X is available now through CompuLab’s worldwide distribution channels and through direct sales (www.compulab.com).
CL-SOM-iMX8X is offered at a variety of configurations starting from $73 for volume orders.
Xilinx has expanded its 16nm Virtex UltraScale+ family to include what it claims to be the world’s largest FPGA, the Virtex UltraScale+ VU19P. By Julien Happich @ www.eenewseurope.com
With 35 billion transistors, the VU19P provides the highest logic density and I/O count on a single device ever built, enabling emulation and prototyping of tomorrow’s most advanced ASIC and SoC technologies, as well as test, measurement, compute, networking, aerospace and defense-related applications.
Featuring 9 million system logic cells, up to 1.5 terabits per-second of DDR4 memory bandwidth and up to 4.5 terabits per-second of transceiver bandwidth and over 2,000 user I/Os, the new FPGA enables the prototyping and emulation of today’s most complex SoCs as well as the development of emerging, complex algorithms such as those used for artificial intelligence, machine learning, video processing and sensor fusion. The VU19P is 1.6X larger than its predecessor and what was previously the industry’s largest FPGA — the 20 nm Virtex UltraScale 440 FPGA.
“The VU19P enables developers to accelerate hardware validation and begin software integration before their ASIC or SoC is available,” said Sumit Shah, senior director, product line marketing and management, Xilinx. “This is our third generation of world-record FPGAs. First was the Virtex-7 2000T, followed by the Virtex UltraScale VU440, and now the Virtex UltraScale+ VU19P. But this is more than silicon technology; we’re providing robust and proven tool flows and IP to support it.”
The VU19P is supported by an extensive set of debug, visibility tools, and IP, providing customers with a comprehensive development platform to quickly design and validate next-generation applications and technologies. Hardware and software co-validation allows for developers to bring up software and implement custom features before physical parts are available. Moreover, the design flow can be co-optimized by using the Xilinx Vivado® Design Suite, which reduces cost and tape-out risk, and improves efficiency and time-to-market. The VU19P will be generally available in the fall of 2020.
Interested in controlling an object or device without physically touching it? So am I! For today’s tutorial, we will look how to build a DIY based Gesture Controlled Robotic Arm using the Microchip MGC3130 based, Seeed 3D gesture and position tracking shield for Raspberry Pi.
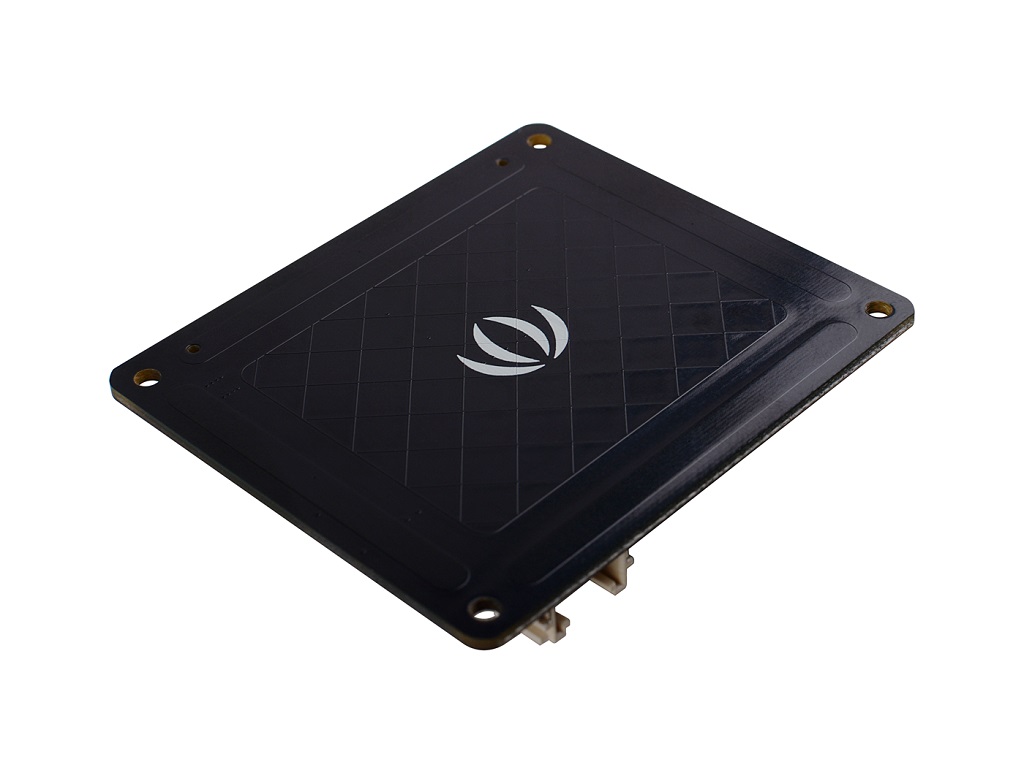
3D Gesture Tracking Shield
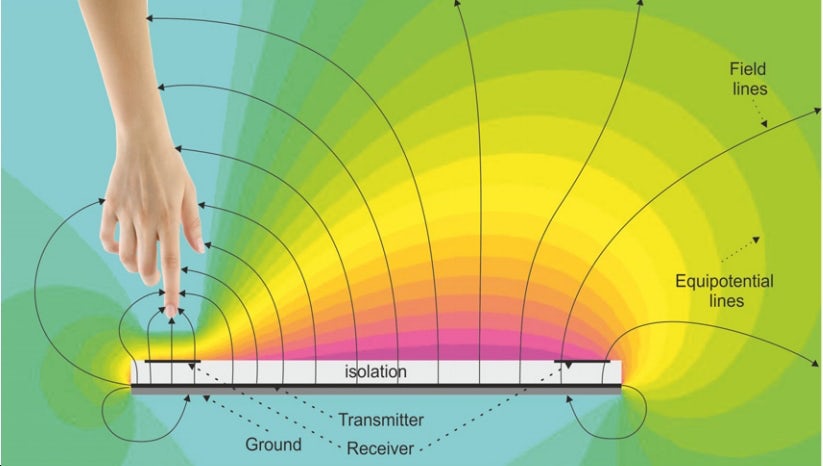
3D tracking has been one of the easiest ways of implementing Natural User Interfaces into devices as it allows users to interact with physical objects without touching them. This is exactly the capability that the Seeed 3D Gesture shield brings to the raspberry pi. This shield is based on the Microchip MGC3130 chip, which enables the Raspberry Pi with 3D gesture recognition and motion tracking function. It can capture x y z position information, can also do proximity sensing and touch sensing, support tap, and double click. As shown in the figure below, the recognition area is divided into two parts: the strip area distributed around and a central panel.
The strip areas can sense the orientation change, including the North, South, West, and East. The central area can sense touch, tap, double click, and gestures in the air area above the shield.
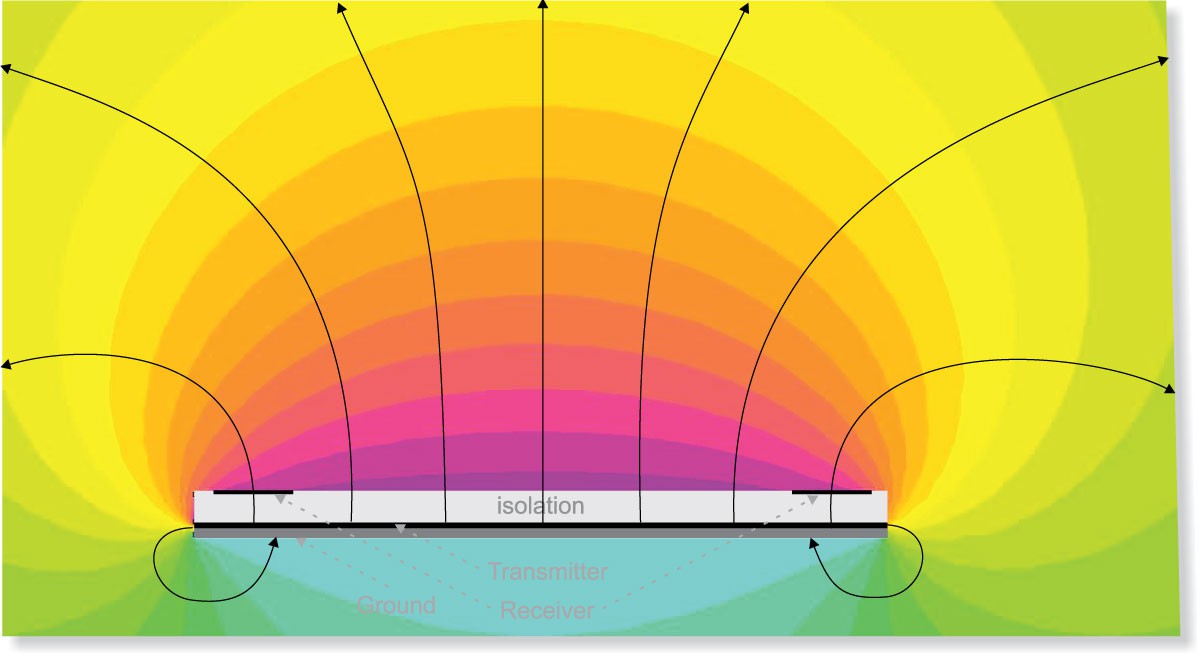
3D movements and gestures are detected by the shield using electrical near field sensing in line with Microchip’s patented GestIC® technology. The shield generates a magnetic field above the central panel and when the hand approaches, it will interfere with that magnetic field, and the magnetic field receiver below the shield will detect the change.
This hat communicates with Raspberry Pi via the I2C interface and also it has reserved a Grove I2C connector in case you need to work with other modules.
Some of the features of the shield include;
Recognition of 3D Hand Gestures and x, y, z Positional Data
Proximity and Touch Sensing
Built-in Colibri Gesture Suite (running on-chip)
Advanced 3D Signal Processing Unit
Detection Range: 0 to 10 cm
On-chip Auto Calibration
Compatible with various models of Raspberry Pi 2, 3, 4, and zero
As mentioned in the introduction, for today’s tutorial, we will examine how a gestured controlled robotics arm can be built using this Gesture and Position shield, a Raspberry pi, and the uArm Metal Robotic Hand. The uArm Metal Robotic Arm is a DIY 4-axis parallel-mechanism, desktop robot arm, modeled after the ABB industrial PalletPack robot. It is made of metal but powered by small-sized more powerful servos, and can be controlled by an Arduino and other DIY boards.
uArm Metal Robot Arm
At the end of today’s tutorial, you will know how to build 3D gesture and position-controlled projects using the 3D gesture tracking shield, and also learn how to interface the uArm Robot Arm with a Raspberry pi.
Required Components
The components required to build this project include;
Raspberry Pi 3 (the Raspberry Pi 4, 2 or Zero will also work)
The components can be bought via the attached links. if you do not have access to the uArm Metal Robotic arm, you could also decide to 3d print your own robotic arm and couple them with off-the-shelf Servo motors, but please note this will not be compatible with the uArm library used under the code section.
Schematics
The Schematics for this project is quite simple due to the easy connection interface possessed by all the components. The 3D Gesture shield as the name implies comes as a shield, as such, it can be easily mounted on the raspberry pi as it is pin-compatible with the Raspberry Pi’s GPIO Layout. The uArm Robotic-arm also makes use of a USB interface through which it can be plugged directly into a USB port on the raspberry pi.
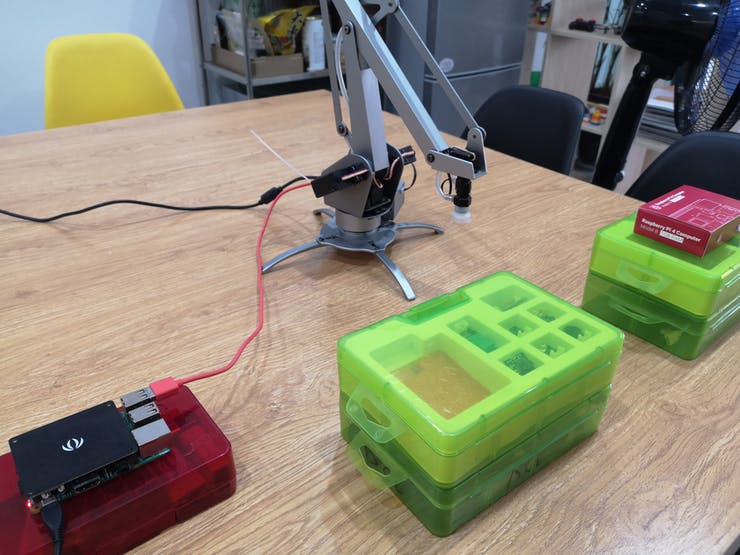
After connecting the components, your setup should look like the image below;
Setup
With this done you can now proceed to set up your raspberry pi and writing the python script for the project.
Preparing the Pi
Before we proceed to write the python script for the project, we need to set up the pi and install all the libraries that are necessary to get things going.
Today’s project as mentioned above is based on the Raspberry Pi 3 running the Raspbian stretch OS. While I believe it should work on the new operating system, I’d rather test before affirming. I will be assuming you understand the process of setting up Raspbian on the raspberry pi and connecting to it in headless mode via ssh or to a monitor via HDMI. If in doubt about any of these processes, you can check out several of our tutorials on setting up the Raspberry Pi.
Enable I2C
With the Pi up and running, the first thing we need to do is to enable I2C based Communication since the shield communicates with the Pi via I2C. To do this, if working with a monitor, click on the raspberry pi icon on the desktop, then select Preferences, and check the “enable” box for I2C.
If running in headless mode via a terminal software like putty, run;
sudo raspi-config
When the config panel opens, use the arrow keys on your keyboard to navigate and select “interface options”, select I2C and click enable and click yes when asked to reboot.
Install Libraries and Dependencies
With I2C enabled, we now need to install python libraries for MGC313o and uArm Robotic Arm.
To start with the uArm Robotic Arm library, Clone the git file by running;
with that complete, Change directory to the folder you just downloaded;
cd pyuarm
then run the installation script using;
sudo python setup.py install
with this done, you should now have the python library for the uArm robotic hand installed.
With the uArm library up and running, the next task is to install “ncurses“. ncurses is a python library that provides API like interfaces that allows the programmer to write text-based user interfaces in a terminal-independent manner and it is one of the dependencies required by the Seeed MGC3130 library. No need to worry too much about this. Start ncurses install by changing into the home directory by running;
then run the following one after the other to configure, make and install the library.
./configure
make
sudo make install
With this done, you can test the installation by running;
ncurses6-config --version
This should give you some information on the version of ncurses installed, or throw an error if it’s not properly installed.
With all the dependencies installed, you can now proceed to download the MGC3130 python library by Linux-Downey. Do this by changing into the home directory and running;
cd ~
git clone https://github.com/linux-downey/seeed_mgc3x30_python.git
change into the library folder, and run the flickrdemo example to test the library installation.
cd seeed_mgc3x30_python
./flick-demo
You should see a result similar to the image below.
With this done, we are now ready to write the code for this project.
Code
Based on the dependencies we have installed you should be able to deduce that the code for this project will be written with python. The code for this project is a modification to the flickrdemo example that came with the MGC3130 library. We will basically add code to control the uArm, changing only three of the functions already written in the demo example.
Writing python code can be pretty difficult using the terminal, for this part, I will advise you to switch to the Pi’s Desktop. If running in the headless mode, you can simply set up VNC Viewer on your host machine and activate the VNC Server on the Pi. This will allow you to access the Pi’s desktop without using a monitor.
On the Pi’s desktop, click on the Raspberry Pi logo, -> select programming -> and double click on python 2.7. Feel free to also use python 3 if you have it installed.
With python now open we can begin writing the code for the project. I will do a brief run through the code highlighting the major changes to the flickrdemo example.
Like with all my projects, we start by importing all the dependencies required for the project. For this, the only addition made to the library example is the addition of the pyuarm library.
#!/usr/bin/env python
import signal
import flicklib
import time
import curses
from curses import wrapper
import pyuarmarm= pyuarm.UArm()
Next, we create functions that determine what happens when specific gestures are detected by the Gesture board. For this, we will be modifying only four of the functions from the library example.
The first function is move(). This function is supposed to return the coordinates of the direction in which a hand gesture is moving.
@flicklib.move()
def move(x, y, z):
global xyztxt
xyztxt = '{:5.3f} {:5.3f} {:5.3f}'.format(x,y,z)
Next, is the flick function. This function is used to move the tip of the robotic arm up or down for picking and placing.
Next, is the air wheel function. This function basically states what you happen when you move your arms in a wheel form in front of the Gesture tracker. It is used to rotate the position of the robotic arm.
@flicklib.airwheel()
def spinny(delta):
global some_value
global airwheeltxt
some_value += delta
if some_value < 0:
some_value = 0
if some_value > 10000:
some_value = 10000
airwheeltxt = str(some_value/100)
arm.set_servo_angle(0, some_value/100)
Next is the double-tap function. this function determines what happens when the gesture board is tapped twice. For this project, it is used to turn “off” the robotic arm.
@flicklib.double_tap()
def doubletap(position):
global doubletaptxt
doubletaptxt = position
arm.set_pump(False)
Next, is the tap function. It dictates what happens when the 3D gesture tracker board is tapped once and was used in this project to turn the Robotic arm “on”.
@flicklib.tap()
def tap(position):
global taptxt
taptxt = position
arm.set_pump(True)
Lastly the touch position function. This provides the coordinates of any point point on the gesture tracker that is touched.
@flicklib.touch()
def touch(position):
global touchtxt
touchtxt = position
The functions above were the only part of the example code that was modified, all that is left is the main function and it is the same as the example with all it does being the detection of gestures and translating it using parameters defined by the library. If the gestures match any of the conditions for the functions above, they are called and the code within the function is executed.
The main function starts by including all the global variables that will be used and initializing the variables to zero.
def main(stdscr):
global xyztxt
global flicktxt
global airwheeltxt
global touchtxt
global taptxt
global doubletaptxt
xyztxt = ''
flicktxt = ''
flickcount = 0
airwheeltxt = ''
airwheelcount = 0
touchtxt = ''
touchcount = 0
taptxt = ''
tapcount = 0
doubletaptxt = ''
doubletapcount = 0
Next, the console is cleared and cursor hidden as Ncurses goes to work to create a GUI on the terminal.
# Clear screen and hide cursor
stdscr.clear()
curses.curs_set(0)
Next, the GUI is created with the title and footer also added.
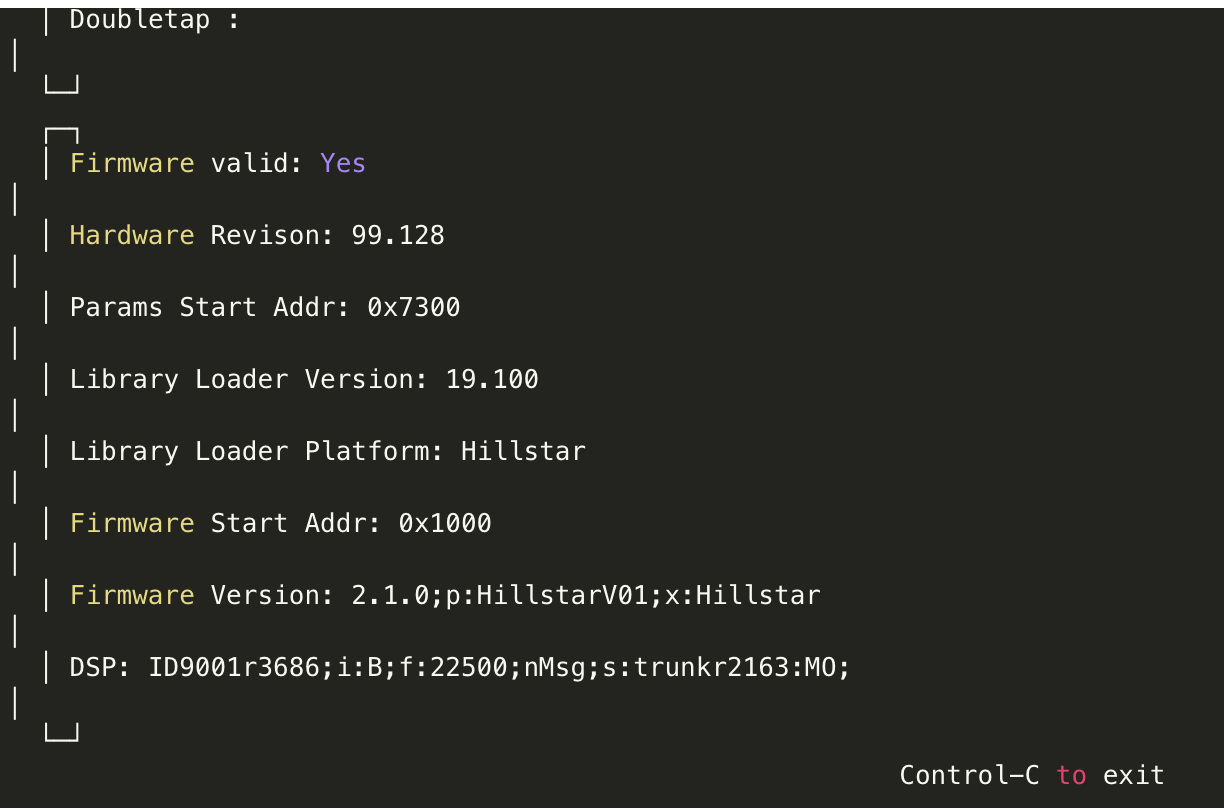
The firmware info part of the GUI Setup is filled. this just serves as a way of verifying that the PI is connected to the 3D gesture tracking sensor without issues.
With this done, the code then dives into a while loop which continuously polls the sensor to check for hand gestures and for every gesture that is recognized out of the 5 gestures we are looking for, it increments a variable matching that gesture by 1 which then triggers the function associated to it and the commands under the function are executed.
The Complete code for the project is available below and also attached along with the library under the download section of the tutorial.
#!/usr/bin/env python
import signal
import flicklib
import time
import curses
from curses import wrapper
import pyuarmarm= pyuarm.UArm()
some_value = 5000
@flicklib.move()
def move(x, y, z):
global xyztxt
xyztxt = '{:5.3f} {:5.3f} {:5.3f}'.format(x,y,z)
@flicklib.flick()
def flick(start,finish):
global flicktxt
flicktxt = start + ' - ' + finish
if flicktxt == "east - west":
arm.set_servo_angle(2, 30)
elif flicktxt == "west - east":
arm.set_servo_angle(2, 35)
@flicklib.airwheel()
def spinny(delta):
global some_value
global airwheeltxt
some_value += delta
if some_value < 0:
some_value = 0
if some_value > 10000:
some_value = 10000
airwheeltxt = str(some_value/100)
arm.set_servo_angle(0, some_value/100)
@flicklib.double_tap()
def doubletap(position):
global doubletaptxt
doubletaptxt = position
arm.set_pump(False)
@flicklib.tap()
def tap(position):
global taptxt
taptxt = position
arm.set_pump(True)
@flicklib.touch()
def touch(position):
global touchtxt
touchtxt = position
#
# Main display using curses
#
def main(stdscr):
global xyztxt
global flicktxt
global airwheeltxt
global touchtxt
global taptxt
global doubletaptxt
xyztxt = ''
flicktxt = ''
flickcount = 0
airwheeltxt = ''
airwheelcount = 0
touchtxt = ''
touchcount = 0
taptxt = ''
tapcount = 0
doubletaptxt = ''
doubletapcount = 0
# Clear screen and hide cursor
stdscr.clear()
curses.curs_set(0)
# Add title and footer
exittxt = 'Control-C to exit'
title = '**** Flick Demo ****'
stdscr.addstr( 0, (curses.COLS - len(title)) / 2, title)
stdscr.addstr(22, (curses.COLS - len(exittxt)) / 2, exittxt)
stdscr.refresh()
fw_info = flicklib.getfwinfo()
datawin = curses.newwin( 8, curses.COLS - 6, 2, 3)
fwwin = curses.newwin(10, curses.COLS - 6, 11, 3)
# Fill firmware info window.
fwwin.erase()
fwwin.border()
fwwin.addstr(1, 2, 'Firmware valid: ' + 'Yes' if fw_info['FwValid'] == 0xaa else 'No')
fwwin.addstr(2, 2, 'Hardware Revison: ' + str(fw_info['HwRev'][0]) + '.' + str(fw_info['HwRev'][1]))
fwwin.addstr(3, 2, 'Params Start Addr: ' + '0x{:04x}'.format(fw_info['ParamStartAddr']))
fwwin.addstr(4, 2, 'Library Loader Version: ' + str(fw_info['LibLoaderVer'][0]) + '.' + str(fw_info['LibLoaderVer'][1]))
fwwin.addstr(5, 2, 'Library Loader Platform: ' + 'Hillstar' if fw_info['LibLoaderPlatform'] == 21 else 'Woodstar')
fwwin.addstr(6, 2, 'Firmware Start Addr: 0x' + '{:04x}'.format(fw_info['FwStartAddr']))
fwver_part1, fwver_part2 = fw_info['FwVersion'].split(';DSP:')
fwwin.addstr(7, 2, 'Firmware Version: ' + fwver_part1)
fwwin.addstr(8, 2, 'DSP: ' + fwver_part2)
fwwin.refresh()
# Update data window continuously until Control-C
while True:
datawin.erase()
datawin.border()
datawin.addstr(1, 2, 'X Y Z : ' + xyztxt)
datawin.addstr(2, 2, 'Flick : ' + flicktxt)
datawin.addstr(3, 2, 'Airwheel : ' + airwheeltxt)
datawin.addstr(4, 2, 'Touch : ' + touchtxt)
datawin.addstr(5, 2, 'Tap : ' + taptxt)
datawin.addstr(6, 2, 'Doubletap : ' + doubletaptxt)
datawin.refresh()
xyztxt = ''
if len(flicktxt) > 0 and flickcount < 5:
flickcount += 1
else:
flicktxt = ''
flickcount = 0
if len(airwheeltxt) > 0 and airwheelcount < 5:
airwheelcount += 1
else:
airwheeltxt = ''
airwheelcount = 0
if len(touchtxt) > 0 and touchcount < 5:
touchcount += 1
else:
touchtxt = ''
touchcount = 0
if len(taptxt) > 0 and tapcount < 5:
tapcount += 1
else:
taptxt = ''
tapcount = 0
if len(doubletaptxt) > 0 and doubletapcount < 5:
doubletapcount += 1
else:
doubletaptxt = ''
doubletapcount = 0
time.sleep(0.1)
wrapper(main)
With the code complete, we can now proceed to try things out.
Demo
Save the code with whatever name you desire and run it. you should now be able to control the robotic hand by moving your hand in a different direction over the 3D Gesture tracker.
Demo
To better understand how the hand movements work, you can watch the video below to see the project in action.
Going Forward
While the application of the 3D gesture tracker in today’s project may not exactly fit your use case, it provides the basic building blocks for you to go on and build a powerful gesture tracking solution. From a gesture-controlled Robot to a gesture-controlled mouse for your computer, the possibilities are truly endless.
That’s it for this tutorial guys. Thanks for reading and following through. Feel free to reach out to me via the comment section with questions about any part of the project.
uIBX-250-BW is an ultra compact size industrial fanless embedded PC which supports Intel Celeron N3160 quad core processor. It supports maximum 8GB DDR3L SO-DIMM memory, HDMI and VGA dual display, two RS-232/422/485 ports, four USB3.0 ports, two Gigabit Ethernet LAN ports, one PCIe Mini slot. uIBX-250-BW is suitable for a wide range of industrial applications in the market, such as POS, Kiosk, ATM, Thin Servers, diskless workstations, building automation, project screens for department stores and supermarket, tour bus displays and much more.
Features
Intel® Celeron® N3160 Quad Core Processor up to 2.24GHz
The smart Inertial Measurement Unit (IMU) BMI270 scores with increased system battery life and an improved accelerometer. Optimised for wearable and hearable applications, the BMI270 is available from Rutronik UK.
The newest member of the BMI260 family of IMUs includes intuitive gesture, context and activity recognition with an integrated plug-and-play step counter. The IMU handles these functions independently of the main system processor, thus significantly extends system battery life. The powerful and accurate gesture and activity-recognition features therefore run in the ultra-low power domain, with current consumption of just 30µA.
This reduces power consumption and enables extended battery charging intervals. The BMI270 measures only 2.5 x 3.0 x 0.8 mm3, and is pin-to-pin compatible with the BMI160 and BMI260. The IMU is well suited for many types of wearable devices, such as smart clothes, smart shoes, smart glasses, wrist and ankle bands as well as hearables. Enabled by the new Bosch MEMS process technology, the BMI270 features a strongly improved accelerometer performance.
It saves OEMs valuable time and costs during testing and manufacturing. The BMI270 is available in two application-specific versions, A and C: The A version detects wrist gestures (flick in/out, pivot up/push, arm up/down, and jiggle) for intuitive control of e.g. smart watches and is designed for Wear OS by GoogleTM. The C version has advanced features for recognizing context / activity change (standing, walking or being in a vehicle).
10GSa/sec sampling and 500Mpts memory depth makes these 600MHz/1GHz/2GHz 4 channel oscilloscopes stand out from the crowd.
Saelig Company, Inc. has introduced the new Rigol TechnologiesMSO8000 Series of digital oscilloscopes, which combine best in class sampling (10GSa/sec) and memory depth (500Mpts) with a modern, flexible user interface enabled by Rigol’s new UltraVision II architecture and innovative Phoenix chipset. Three models are available with input bandwidths from 600 MHz to 2GHz, each with 4 analog channels. The series is MSO ready: an optional 16-channel logic analyzer interface is provided to provide digital debug capabilities with the addition of 16 channel probes and software.
The advanced MSO8000 Series features a 10.1” 1024 x 600 capacitive multi-touch color LCD screen with 256-level intensity grading and a waveform refresh rate of up to 600,000wfm/sec. The enhanced FFT capability offers real-time spectrum analysis of up to 1Mpts of waveform data. The MSO8000 Series user interface provides five distinct ways to interact with the instrument: LCD Touch, traditional button and knob, mouse/monitor, PC control, and remote web operation. A two-channel 25MHz arbitrary waveform generator is also available.
The MSO8000 series utilizes Rigol’s proprietary Phoenix chipset, which allows sampling at a remarkable 10GSa/s, and integrates all of the front-end analog processing. All three models in the scope series provide non-stop recording and playback for a maximum of 450,000 frames of real-time waveforms using a segmented storage technique. Trigger conditions can be set to make a selective choice in capturing and saving the signals of interest.
With a total of seven unique integrated instruments (digital oscilloscope, 16-channel logic analyzer, spectrum analyzer, optional arbitrary waveform generator, digital voltmeter, 6-digit frequency counter and totalizer, and optional protocol analyzer, the MSO8000 Series allows customers to quickly identify and resolve complex design and debug challenges. The optional Protocol Analyzer supports RS232/UART, I2C, SPI, CAN, LIN, I2S, FlexRay, and MIL-STD-1553 serial bus. The protocol trigger and decoding operate on both the analog and the digital channels: RS232/UART, I2C, and SPI protocols. The Jitter firmware option supports real-time eye diagram and jitter analysis.
The MSO8000 series is field-upgradeable to higher bandwidths and is equipped with hardware pass/fail test function in the standard configuration, which can be useful for long length signal monitoring during design, and production test. Setting the test mask on a known “standard” waveform allows an automatic comparison with the signal under test to show a successful or failed test.
The MSO8000 series external interfaces include USB HOST&DEVICE, LAN(LXI), HDMI, TRIG OUT, and USB-GPIB (option). The series brings innovative analysis and visualization capabilities to embedded design, power analysis, serial decode, and RF applications. Made by Rigol Technologies Inc., a leading manufacturer of precision electronic instrumentation for test and measurement, the MSO8000 Series digital oscilloscopes are available now from Saelig Company, Inc., their USA technical distributor.
Original publication: Elektor magazine November 2016 Author: Kurt Schuster Free download expires: Friday 23 August, 2019.
Suppose you want to measure a slowly-varying voltage from a sensor, or perhaps plot the discharge curve of a battery. Is it really necessary to sit there and note down a reading from the multimeter every so many seconds or minutes? It is less tedious and much more elegant to use this Arduino-based unit connected to your oscilloscope. Two questions motivated Kurt Schuster at the beginning of this project: ‘is my battery any good?’ and ‘is this charger charging my battery correctly?’
Go to the article page and download a pdf copy of the magazine article. Downloading is free until Friday 23 August, 2019.