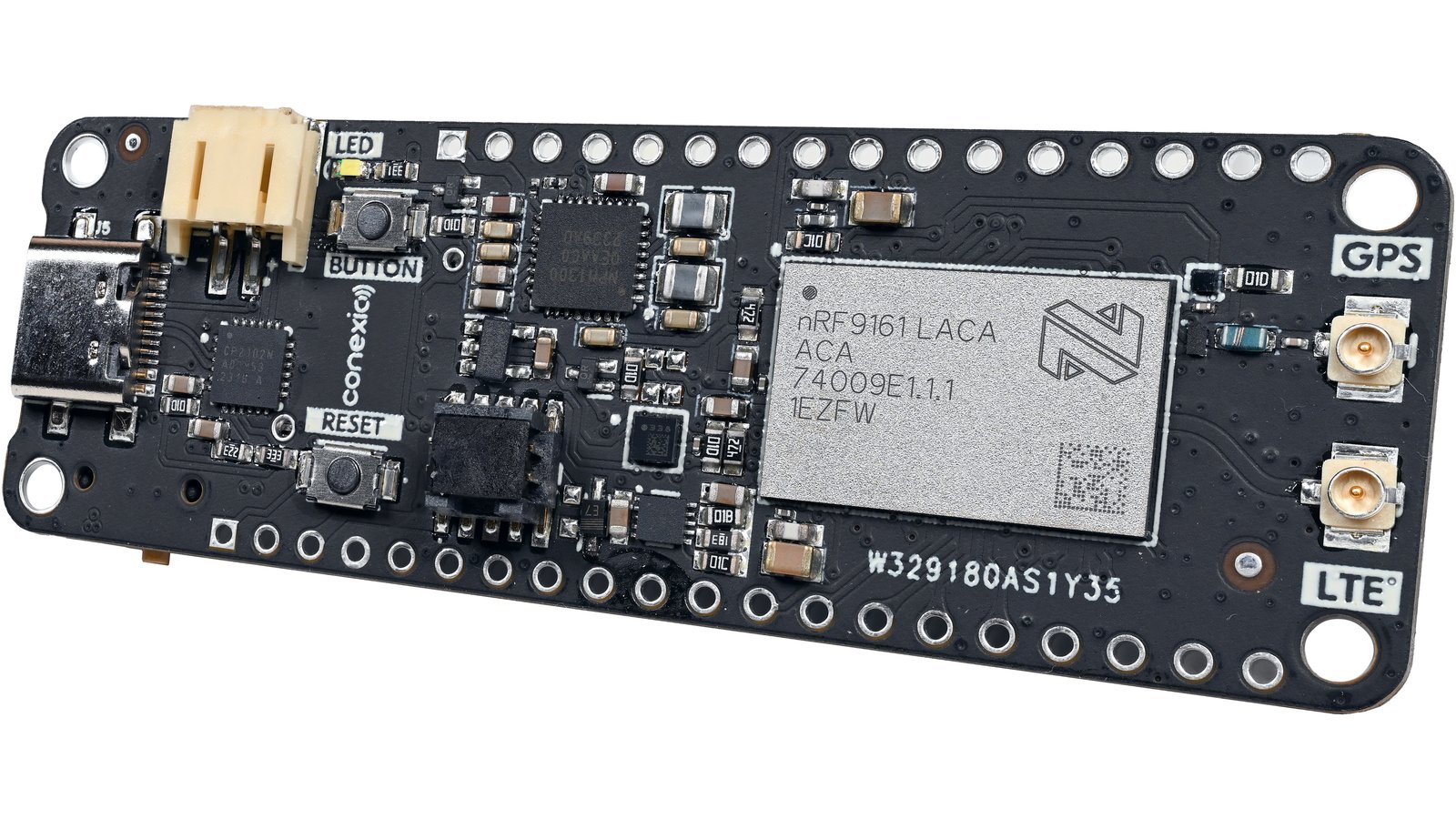
Conexio Technologies has unveiled the Conexio Stratus Pro, an advanced cellular-based microcontroller board designed for IoT applications. This new product, available soon on Crowd Supply, features the Nordic Semiconductor nRF9161 SiP and nPM1300 PMIC in a Feather form factor, enhancing its versatility and performance for diverse projects.
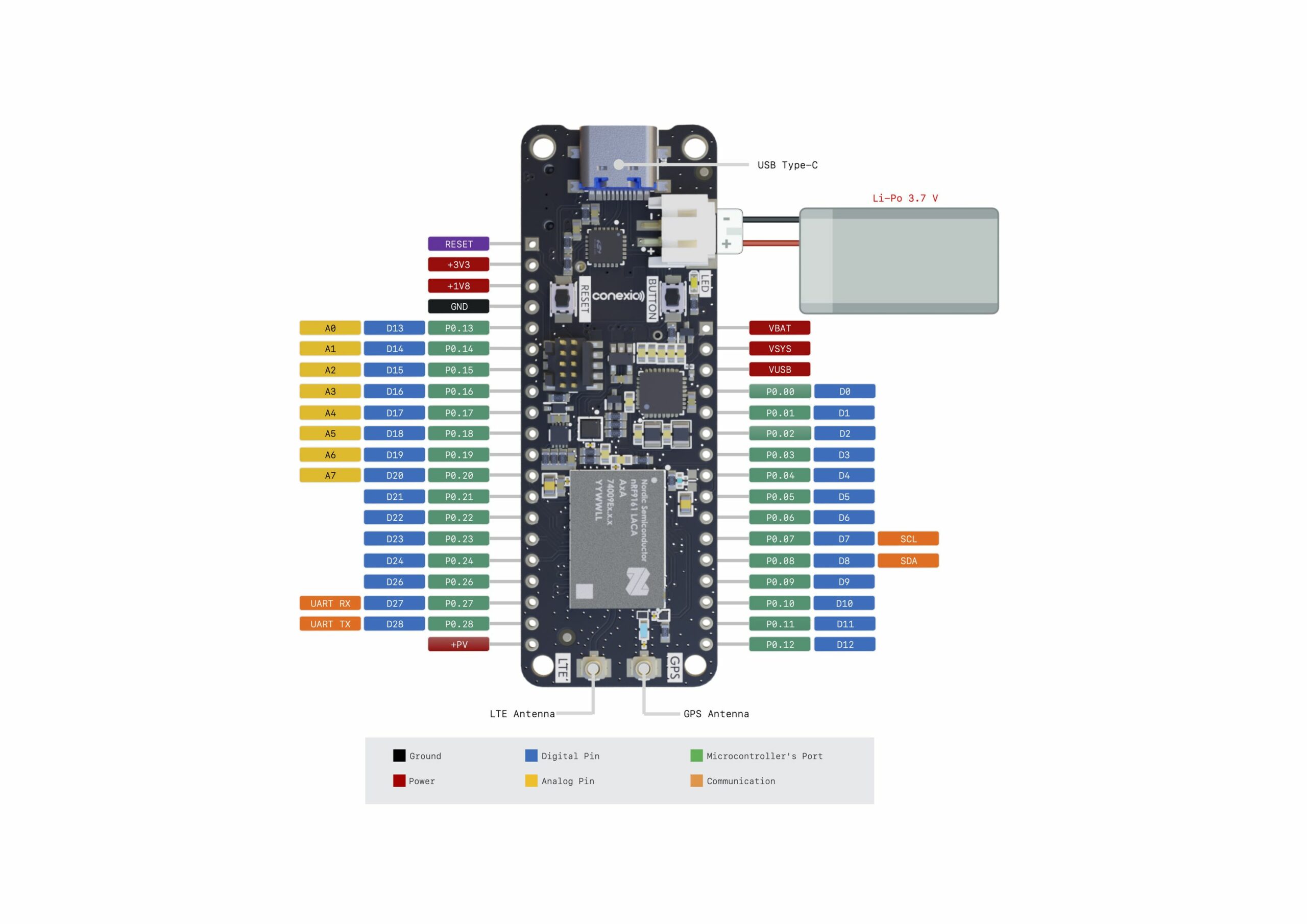
The Stratus Pro integrates a Nordic Semiconductor nRF9161 system-in-package (SiP) that includes a microcontroller, LTE cellular radio, and GPS receiver. Additionally, the board houses a Nordic nPM1300 power management IC (PMIC) and a TI BQ25185 IC for charging various battery chemistries such as Li-ion, Li-Poly, and LiFePO4. An STMicroelectronics three-axis accelerometer further extends its functionality. The nRF9161 features an Arm Cortex-M33 with 1MB of flash memory and 256KB of RAM, supported by an external 16-kilobit EEPROM. The cellular modem is compatible with LTE-M and NB-IoT and is DECT NR+ ready, ensuring robust global connectivity.
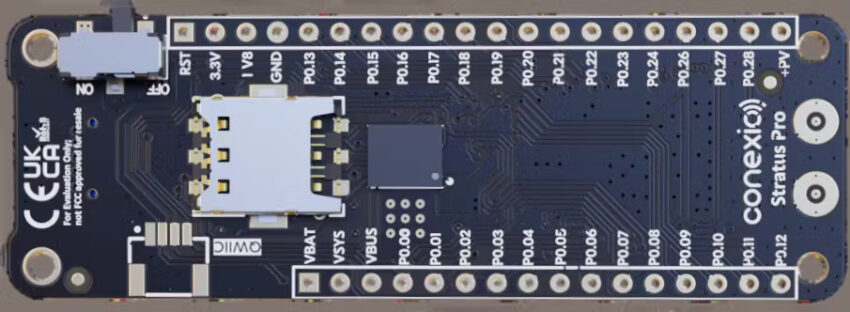
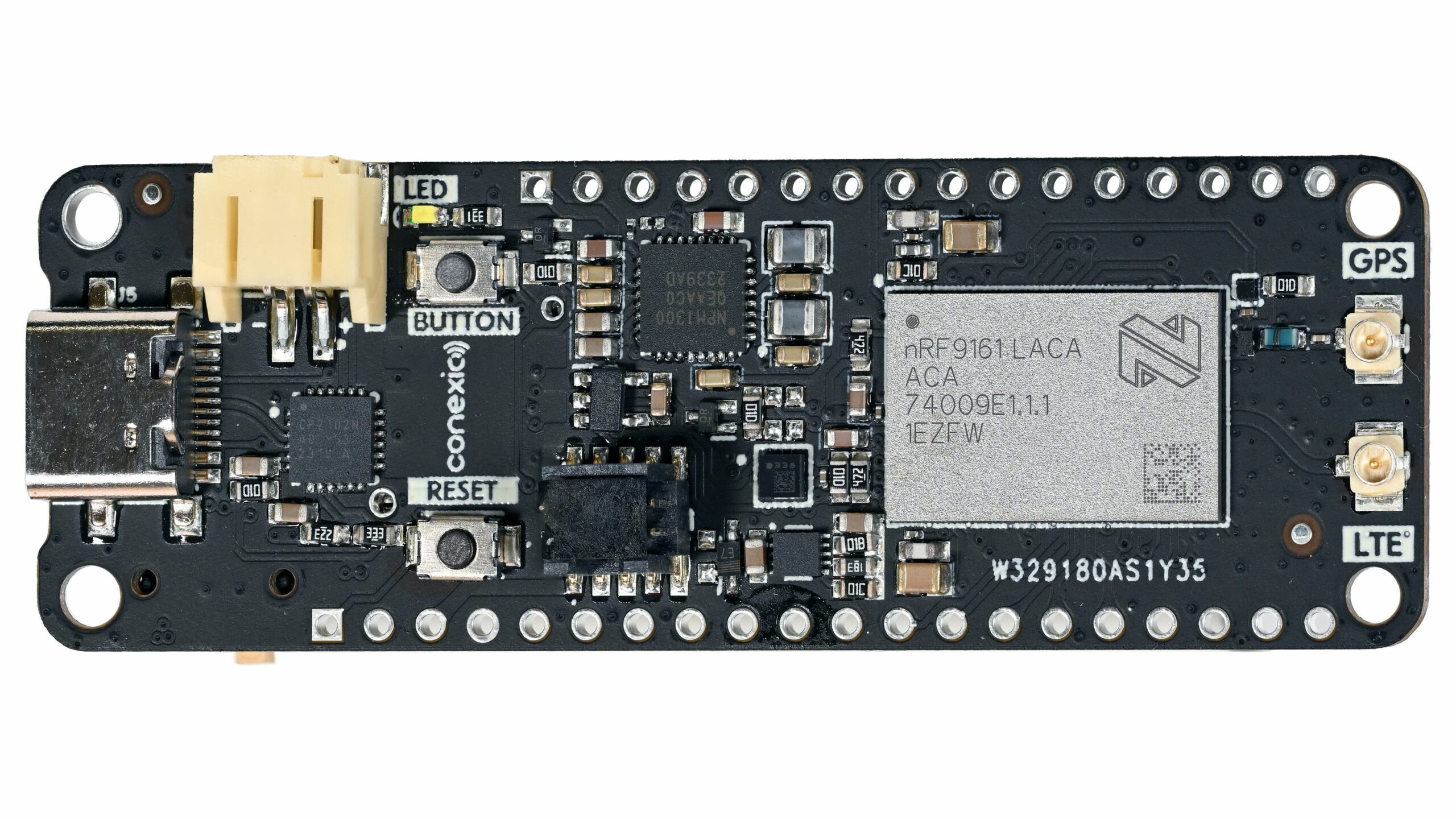
Stratus Pro Back
Adopting the Adafruit Feather form factor, the Stratus Pro’s PCB measures 66.04 x 25.40 millimeters, offering 28 GPIO pins, a programmable push button, and an LED. It includes a SparkFun Qwiic-compatible connector for easy peripheral connections without soldering and can be programmed via USB-C or the onboard SWD/JTAG connector. Designed for seamless global use, the device supports eSIM and software SIM, providing reliable connectivity in over 100 countries. It comes with a data plan offering 500MB of cellular data and 250 SMS messages, valid for 10 years.
Conexio plans to open-source the Stratus Pro hardware design post-Crowd Supply campaign. Software examples and board design files will be available on Conexio’s GitHub, with projects built using the Nordic nRF Connect SDK on the Zephyr RTOS. Comprehensive documentation is available now, inviting users to explore the full potential of the Stratus Pro.
Mekotronics R57 is a fanless AI mini-PC powered by a Rockchip RK3576 octa-core Cortex-A72/A53 SoC SoC. Other than that it has dual GbE Ethernet, 6 TOPS NPU RS232, RS485, and digital inputs and outputs, and in terms of RAM and Storage it includes up to 4GB LPDDR5, a 32GB eMMC flash.
While looking at the specifications of this PC it looked very similar to the Mekotronics R58X but upon looking it’s clear that it has some differences, like it has now got a HDMI IN port and a HDMI Out port and it also got h RS232, RS485, ports.
Decoder: H.264/AVC 4K@60fps; H.264/HEVC, VP9, AVS2, AV1 4K@120fps or 8K@30fps
Encoder: H.265, H.264 up to 4K@60fps; supports multi-stream encoding
OS Support:
Android 14, Buildroot, Debian, Armbian
Video Output:
HDMI output 4K@120fps or 8K@30fps
Type-C (DP1.4 protocol)
HDR Support:
HDR10 / HDR HLG/HDR ViVid
Video Input:
HDMI input 4k@60fps
Camera:
MIPI CSI
Display:
MIPI DSI
Ethernet:
Dual G-LAN network 1000Mbps x2
Wireless:
AP6256, 2.4G/5G WiFi and Bluetooth V5.1 EDR and BLE
Clock:
Support RTC clock
USB:
USB3.0, USB2.0, Type-C
PCIE:
PCIE 3.0 M.2 M-key), support NVMe SSD size 2280
Mini PCIe:
Mini PCIe for 4G LTE/GPS module
SIM Card Slot:
Support Nano SIM card for 4G
Audio:
Support MIC and audio jack
Industrial Ports:
RS232, RS485
GPIO with High/Low switch
DC Power:
12V 2Ah (DC port 5.5×2.1)
Dimension:
186 x 106 x 33mm
Weight:
362g
Mekotronics ensures comprehensive support for multiple operating systems including Android 14, Ubuntu, Debian, and Buildroot. Additionally, the system seamlessly integrates with AI frameworks such as TensorFlow, MXNet, PyTorch, and Caffe through the RKNPU2 toolkit, a feature consistent with other recent Rockchip SoCs.
Mekotronics R57 fanless AI mini PC is available for $140 on the company’s website with the default configuration of 4GB RAM and 32GB of Storage. More details and purchasing options can be found on the products page.
Incredibly robust and with extensive connectivity, the uCOM-ADN offers a compact, efficient, and versatile tool for building industrial IoT applications.
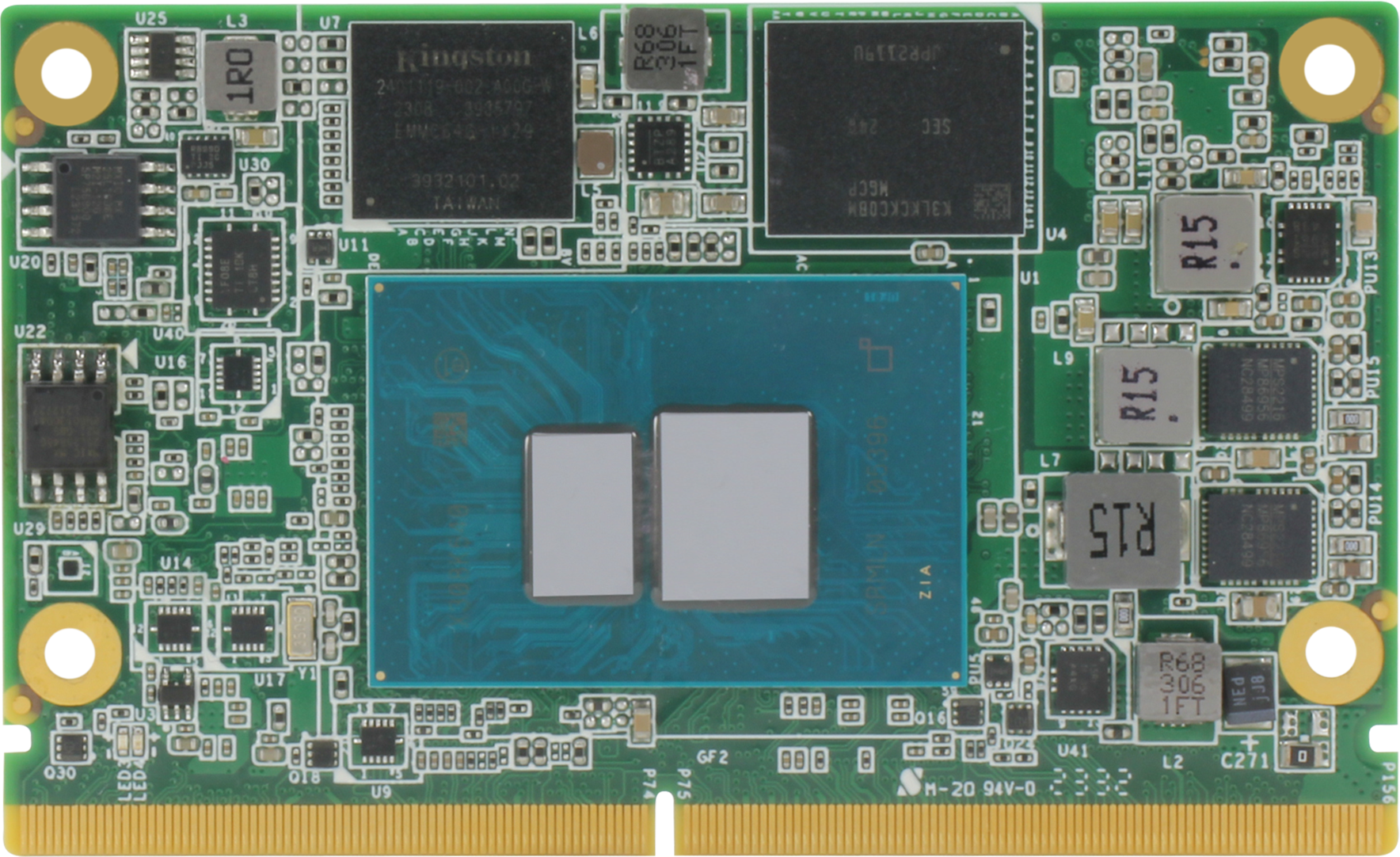
AAEON, a leader in industrial IoT and AI Edge solutions has released the uCOM-ADN, a SMARC module powered by Intel® Atom® x7425E, Intel® Processor N97, and Intel® Core™ i3-N305 processors.
The uCOM-ADN represents the revival of AAEON’s involvement in the SMARC module sphere, where it is clear that the company’s extensive experience in creating reliable and high-performance Computer-on-Modules has proven invaluable. A standout feature of its newest offering is the uCOM-ADN’s support for the 8-core, 8-thread Intel® Core™ i3-N305 Processor, which merges high performance with efficient operation. The product also supports Intel Atom® x7425E and Intel® Processor N97 from the broader Intel® platform, giving users more flexibility.
Featuring up to 8GB of onboard LPDDR5x memory and 64GB of eMMC storage, the uCOM-ADN can achieve excellent data processing speed while providing ample storage capacity. Integrated Intel® UHD Graphics also lend it to applications requiring quality visual output, emphasized by two DP++ and one eDP interface at resolutions up to 3840 x 2160. This selection makes the uCOM-ADN well-suited to digital signage and smart kiosk solutions.
Key Specifications
Processor: Alder Lake N (Core i3-N305, Intel Atom x7425E, or Intel Processor N97)
Interfaces & Expansion: MIPI CSI x 2, PCIe Gen 3 x 3, GPIO, SMBus, UART
Dimensions: 3.23″ x 1.97″ (82mm x 50mm)
Operating Systems: Windows 10/Windows 11 Enterprise, Linux Ubuntu 22.04.2/Kernel 5.19
For visual data acquisition, users have a broad range of interfaces to choose from, including two MIPI CSI, multiple USB, and dual LAN connectors supporting Intel® Ethernet Controllers I226-V or I226-IT, both running at 2.5GbE. For industrial communication, the module offers several UART interfaces, alongside a customizable 7-bit GPIO and SMBus. Expansion can be found in the form of three PCIe Gen 3 slots, while AAEON notes that a fourth PCIe Gen 3 interface is available upon request.
Of particular note is the module’s rugged design, which has a default operating temperature range of -20°C ~ 70°C, with an extended temperature SKU also available boasting a -40°C to 85°C temperature tolerance. This will be good news for those seeking a solution able to withstand challenging industrial environments while maintaining optimal performance.
The inclusion of TPM 2.0 also ensures robust security for critical applications, further lending credence to the uCOM-ADN’s industrial suitability. Support for both Windows® 10, Windows® 11 Enterprise, and Linux Ubuntu 22.04.2/Kernel 5.19 grants the uCOM-ADN broad OS compatibility, making it easy to integrate into existing systems.
For detailed specifications and additional information about the uCOM-ADN, please visit the product page on the AAEON website, or contact an AAEON representative directly.
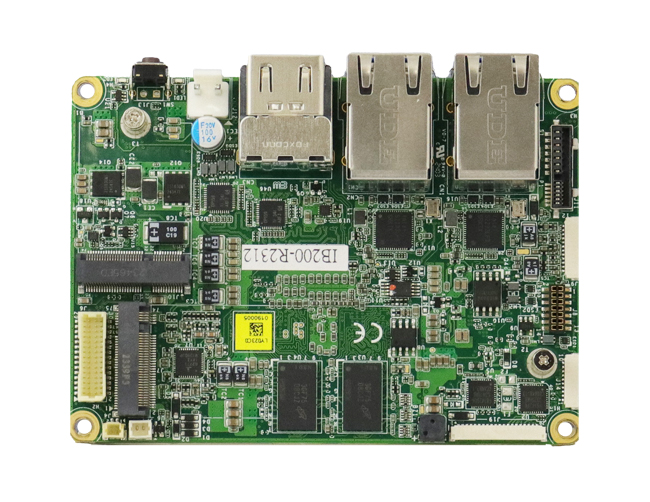
IBASE Technology Inc., a global leader in embedded computing solutions, proudly unveils its first ultra-compact 2.5” single board computer (SBC) designed for edge computing applications. The advanced IB200 SBC offers exceptional graphics processing performance with the AMD Ryzen™ Embedded R2000 Series. Featuring 4 cores and 8 threads integrated with the AMD Radeon Vega graphics controller, it delivers twice the CPU core count compared to the R1000 Series.
IB200 FEATURES:
AMD Ryzen™ Embedded R2000 series APU on board, up to 4 cores/8 threads
2x GbE LAN, 4x COM, 2x USB 3.2 Gen2 (10Gbps) [with PDPC support], 3x USB 2.0 via pin headers
Supports 1x M.2 (M-Key, type 2280) & 1x M.2 (E-Key, type 2230)
Supports 4x COM – COM1/COM2: RS-232/422/485, COM3/COM4: RS232 (Default: RS-232, adjustable in BIOS)
Energy-efficient 12-25W thermal design
The industrial-grade IB200 SBC ensures a seamless multimedia experience with two HDMI 2.0b ports supporting 4K display and a dual-channel LVDS with a resolution of 1920×1200 @ 60Hz. It offers a comprehensive set of connectivity options, including dual Intel I226IT Gigabit LAN ports, four COM, two USB 3.2 Gen2 (10Gbps) ports with PDPC support, three USB 2.0 headers, and one M.2 2280 M-key and one M.2 2230 E-key slot, ensuring flexibility in storage selection and speed. Additionally, the board is equipped with TPM 2.0 and a SATA II interface, making it a versatile solution for various industrial IoT applications.
The IB200 comes with an energy-efficient 12-25W thermal design and delivers robust operation with an operating temperature range from 0°C to 60°C. The mini SBC, with dimensions of 100mm by 72mm, is designed for industries requiring powerful computing in a compact form factor. Its advanced features and connectivity options make it an ideal choice for modern edge computing applications such as manufacturing, industrial automation and smart retail, ensuring long-term reliability and superior graphics performance.
A bidirectional counter is a binary counter that operates synchronously in both up and down directions. It is capable of counting both toward & away from a predefined number and back to zero. Any given count sequence can be counted by such bidirectional counter in either the up or down direction.
It is occasionally required to count “down” from a predefined value to zero and count “up” from zero and grow or increment to some preset number. This allows us to create an output that activates when the zero count or any other pre-set value is reached.
When an external clock pulse is applied to a binary or Binary Coded Decimal (BCD) down counter, the count drops by one from a predetermined number. Typically, this counter is called a Down Counter (CTD). Special dual-purpose integrated circuits (ICs) with an additional input pin to select the up- or down-count mode are 4-bit binary up- or down-counters, such as the TTL 74LS193 or CMOS CD4510.
Design of Bidirectional Counters
Flip-flops, which store the count, and extra logic circuits that regulate the counting’s direction are the fundamental parts of a bidirectional counter. When designing a bidirectional counter, the right flip-flops and logic gates must be chosen, and a circuit that appropriately processes the U/D control signal to regulate the counting direction must be created. The counting range (modulus), counter type (synchronous or asynchronous), and counting sequence (binary or decade) must first be defined. Second, choose the flip-flops (D, JK, etc.) according to the kind of counter required. Then, create the necessary flip-flop inputs by designing the combinational logic circuit to process the U/D control signal. Make sure the design is validated and that the counting behavior is correct in both directions by using simulation tools.
Advanced bidirectional counter designs provide extra features including cascade capabilities, configurable counting ranges, and preset and clear functionality for complicated applications. The counting range can be increased by cascading numerous counters. For example, an 8-bit counter that can count from 0 to 255 is produced by cascading two 4-bit counters. For adaptive systems that require real-time adjustments, programmable counters allow for the dynamic modification of the counting range and direction based on external inputs. While clean functionality resets the number to zero, preset functionality allows the counter to be set to a specified value. These characteristics improve flexibility and control.
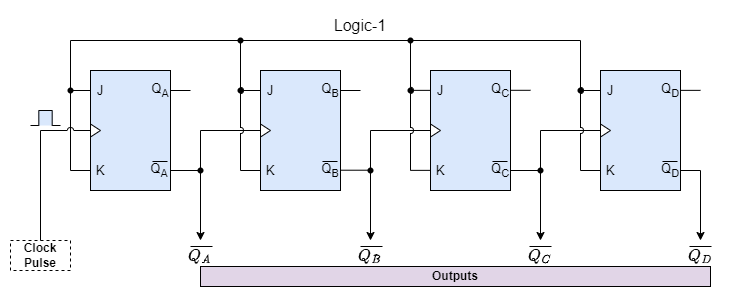
4-bit Count Down Counter
Fig-1: 4-bit Bidirectional Down Counter
As shown in the figure, instead of being activated by the Q output as in the up-counter configuration, the 4-bit counter uses the Q̅ output of the preceding flip-flop to trigger the state change of each flip-flop on the falling edge (1-to-0 transition) of the CLK input. Consequently, rather than moving from 1 to 0, each flip-flop will change states when the one before it goes from 0 to 1 at its output.
Bidirectional Counter
While both synchronous and asynchronous counters can count “Up” or “Down,” bidirectional counters are a more “universal” kind of counter that can count in both ways, Up or Down, depending on the condition of its input control pin. Bidirectional counters, also referred to as Up/Down counters, may count in either way throughout any given count sequence. As seen below, they can be reversed at any time by applying an extra control input.
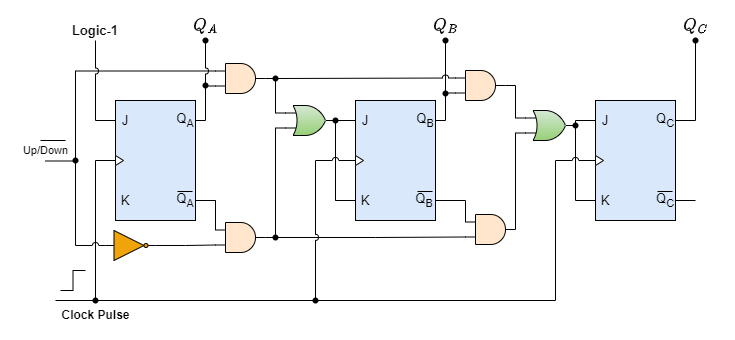
Synchronous 3-bit Up/Down Counter
Fig-2: 3-bit Bidirectional Counter
The circuit shown above is a typical three-bit synchronous counter that counts from zero (000) to seven (111) and back to zero using JK flip-flops that are set to function as toggle or T-type flip-flops. The 3-bit counter then proceeds in one of two ways: either upward (0,1,2,3,4,5,6,7) or downward (7,6,5,4,3,2,1,0).
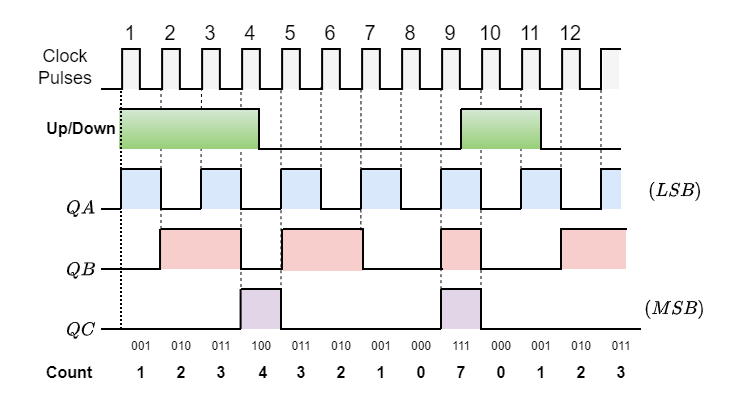
Most bidirectional counters are often configured to flip their count direction up or down at any time throughout their counting cycle. This is accomplished by employing a second input pin that controls the count direction (up or down). The timing diagram illustrates how the counter functions when the state of this Up/Down input changes.
Fig-3: Timing Diagram of Bidirectional Counter
Nowadays, a complete bidirectional counter chip consists of an Integrated Circuit (IC) that has both up and down counters integrated into it. This IC may be completely programmed to count in both directions from any preset number. The “74F569” is a completely synchronous Up/Down binary counter, the 74HC190 4-bit a BCD decade Up/Down counter, and the CMOS 4029 4-bit Synchronous Up/Down counter are common devices.
Applications of Bidirectional Counters
These counters can count events or readings that are subject to bidirectional fluctuations in telemetry systems. For example, Monitoring and adjusting levels in a water reservoir.
They are used in systems for controlling and timing the length of traffic signals. Changing the length of the green and red lights by traffic flow is one example.
They are employed for accurate angular position control and measurement in motor shafts and other rotating machinery. For instance, they are used to provide feedback on the precise location of the motor shaft in servo motors.
In Computer Numerical Control (CNC) machines and robots, they are essential to monitor the location of moving components. Like, tracking the position of a robotic arm in an industrial robot.
Bidirectional counters are used to count time in two modes: reducing for countdowns and growing for elapsed time. An example would be a microwave oven’s countdown timer.
Advantages of Bidirectional Counters
Bidirectional counters are more useful for a wider range of applications than basic (unidirectional) counters because they offer various benefits. For example:
Scenarios requiring both increment and decrement operations without the requirement for separate devices for each function is one of the main advantages.
Separate up and down counters use more space on a circuit board than a single bidirectional counter.
Up and down counting can be combined into a single device, which lowers the system’s overall cost and makes the system more attractive from an economic standpoint.
Bidirectional counters improve accuracy and reaction times by giving instantaneous data on direction changes in control systems like motor controllers or robotic arms.
Ideal for intricate jobs including reversible procedures, dynamically adjusting systems, and location tracking.
Conclusion
A bidirectional counter is a binary counter that can count both up and down, moving towards or away from a predefined number and back to zero.
These counters can handle any given count sequence in either direction (up or down) and are capable of activating outputs when zero or any preset value is reached.
Bidirectional counters can be configured as either synchronous or asynchronous and typically include a control pin for switching between up and down counting modes. Examples include the TTL 74LS193 and CMOS CD4510.
Widely used in applications such as telemetry systems, traffic signal control, angular position measurement in motors, CNC machines, and countdown timers in devices like microwave ovens.
These counters offer versatility by combining up and down counting in one device, reducing space and cost while enhancing accuracy and responsiveness in control systems. They are ideal for reversible processes and dynamic adjustments in various systems.
In physics, electric fields are regions in space where an electric force is experienced by a charged object due to the presence of another charged object. These fields can be either uniform or non-uniform. A uniform field is one where the field strength (or the force) is the same at every point in the field. This means that the magnitude and direction of the field are constant throughout. We will consider these types of fields in the next article.
Non-uniform fields are those where the field strength and direction vary from point to point. This means that the magnitude and direction of the field can change depending on different positions in the field. The electric field due to a point charge is an example of a non-uniform field since it decreases with distance away from the source charge. Recall that a point charge is an electric charge considered to exist at a single point, and thus having neither area nor volume, i.e., an idealized mathematical concept.
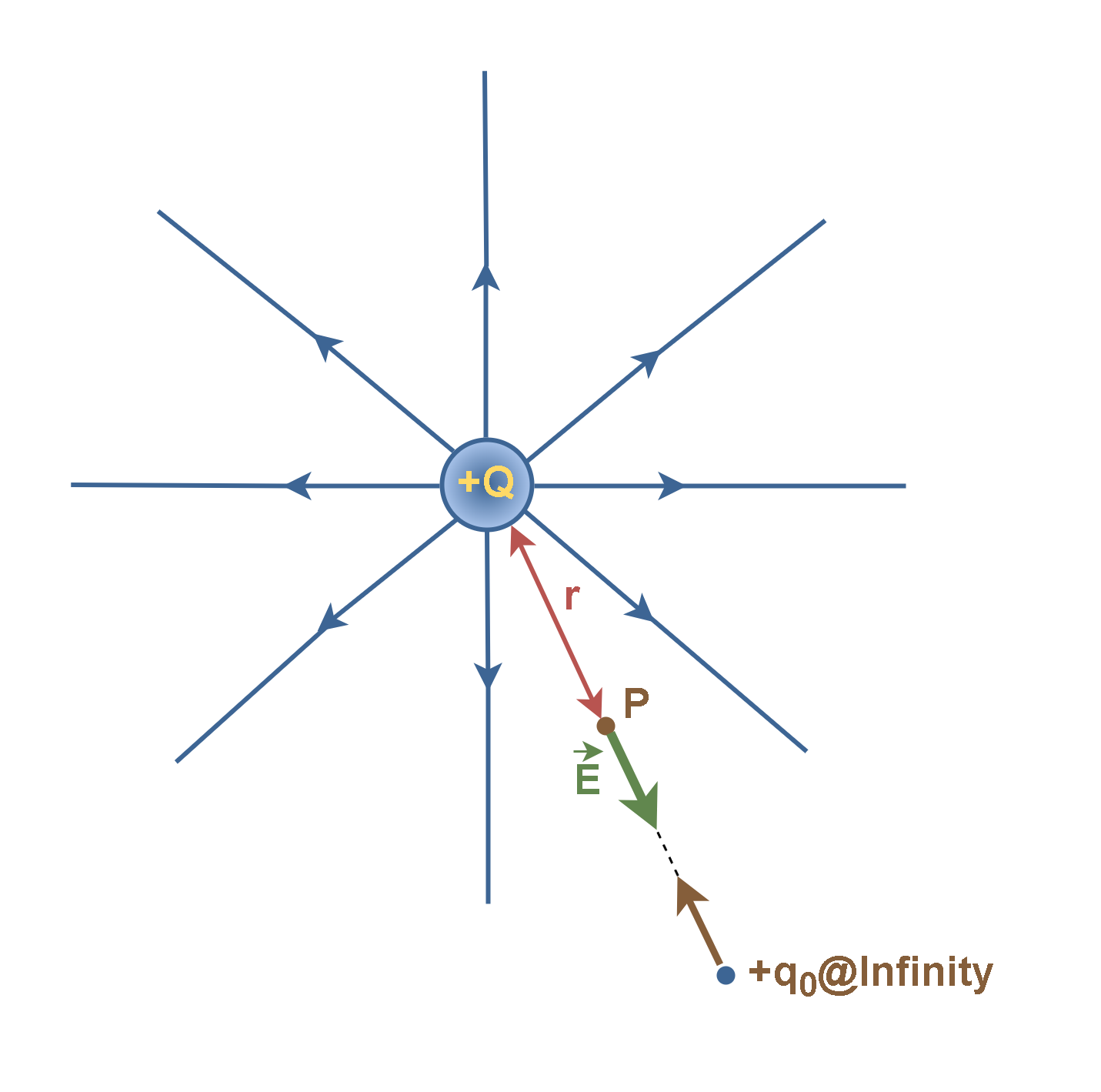
Consider the case of a nonuniform electric field such as exists in the vicinity of the positive point charge Q in Figure 1. Let us assume a positive test charge q0 is located at point P in the field E associated with the charge Q.
Figure 1: The configuration of the point charge Q and the test charge q0 at infinity
Naturally, there is a nonuniform electric field at point P caused by the charge Q, and so there is an electric force F at point P which is exerted to the test charge q0 as it explained by Equation 1:
Equation 1: The electric force exerted on the test charge q0 in the electric field E
Generally, Field lines indicate the directions of the force on a positive test charge introduced into the field. If the test charge is released in a field, it moves in the direction of field lines in each position. In the case of a point charge Q, it moves radially away from Q, so that the field lines are radial, like the spokes of a wheel. The field intensity also varies inversely as the square of the distance from Q. For this reason, In Figure 1 the field lines become more widely separated as the distance ‘r’ increases.
In Figure 1 configuration, we want to find the potential energyU associated with the test charge at point P. First, we need a reference configuration for zero potential energy (U = 0). A reasonable choice is for the test charge q0 to be infinitely far from the charge Q, because then there is no interaction between charges.
We know that if we want to move the test charge q0 against the electric force F, it requires physical work. The work done by the applied force F on the charge q0 changes its potential energy U. Then, we assume that we bring the test charge from infinity to point P in the configuration of Figure 1.
The electric potentialV at the point P in space is defined as the work done in bringing a positive test charge q0 from infinity to that point, divided by the magnitude of the charge. Let’s use the notation ∞ for W to emphasize that the test charge is brought in from infinity and also use a negative sign for W∞ because it is done opposite to the electric force F. Then, the electric potential V at point P is given by Equation 2:
Equation 2: The electrical potential in terms of the work or the potential energy and the test charge q0
So, the electric potential V is the amount of potential energy per unit charge. The charge Q sets up this potential V at point P regardless of whether the test charge happens to be there. The work and thus the potential energy can be positive or negative depending on the sign of the charge Q.
From Equation 2 we see that V is a scalar quantity (because there is no direction associated with potential energy or charge) and can be positive or negative (because potential energy and charge have signs). The work W∞ done by the field is also scalar and path-independent.
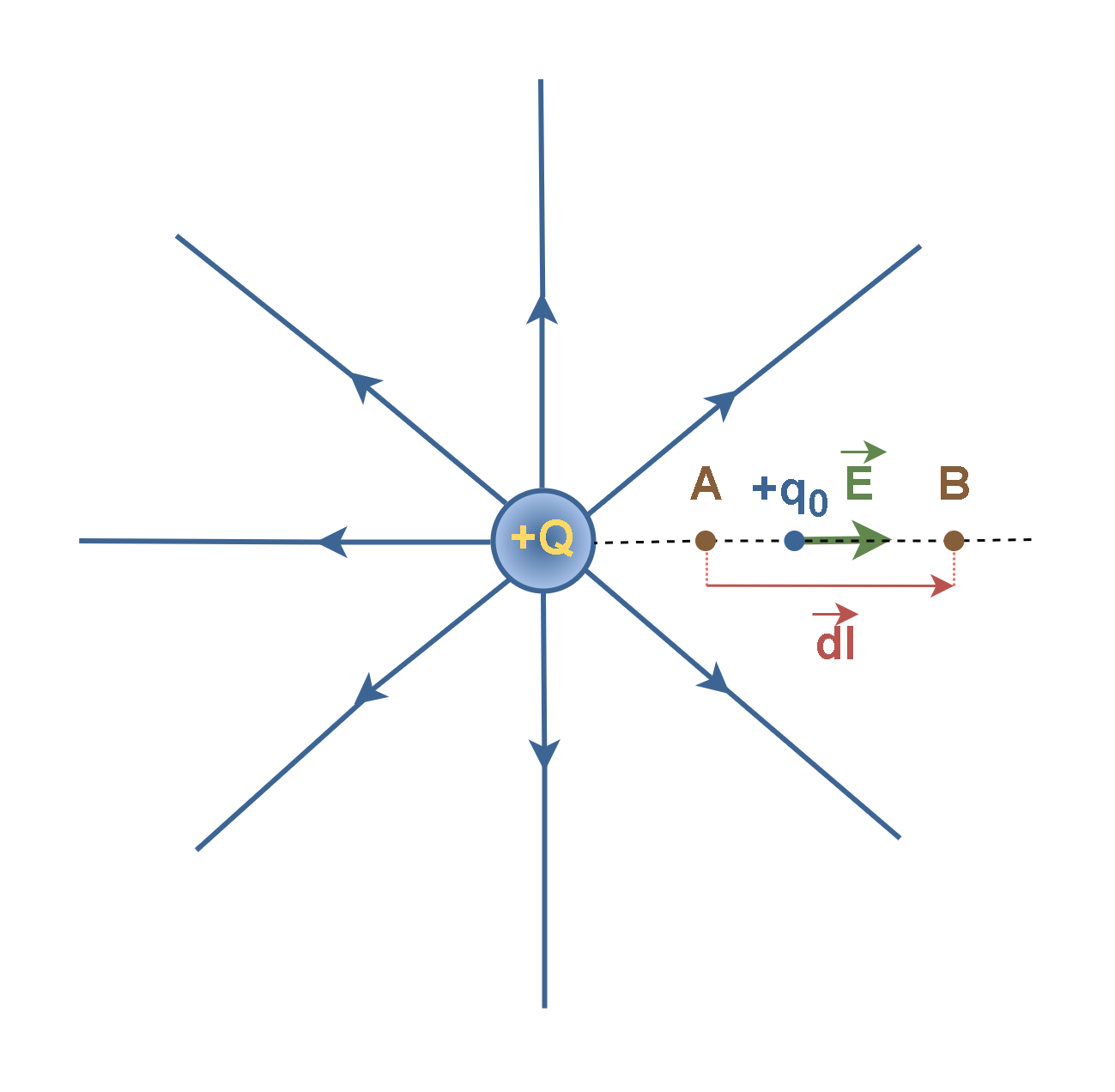
Figure 2: Movement of the charge q0 caused by the field E in a linear path AB
If the test charge q0 moves from an initial point A to a second point B in the electric field of a charged object, as depicted in Figure 2, the electric potential changes by ΔV = VB – VA. We can relate the potential energy change ΔU to the work WAB done by the electric force as the particle moves from A to B by substituting from Equation 2 to conclude Equation 3:
Equation 3: The relationship between the work, changing potential energy and electric potentials
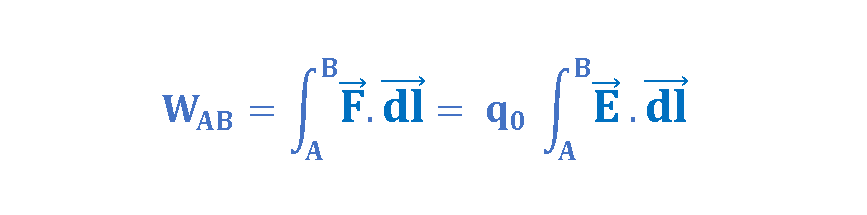
Generally, if the test charge q0 moves between points A and B in the field, the work WAB done is given by Equation 4:
Equation 4: General definition for the work done by force F in the path AB
where F is the electric force on the test charge and is the path vector which indicates the moving of the test charge q0 between points A and B.
Because in our assumption the test charge q0 moves between points A and B in the field E along a radial path, therefore, the vectors have the same direction, and the dot-product of vectors inside the integral in Equation 4 simply changes to the scalar product of magnitudes of the two vectors.
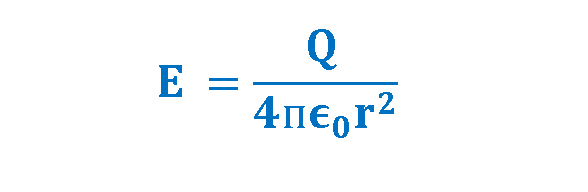
In our previous articles we have already calculated the intensity of electric field E based on Coulomb’s law as explained in Equation 5:
Equation 5: The definition of the electric field
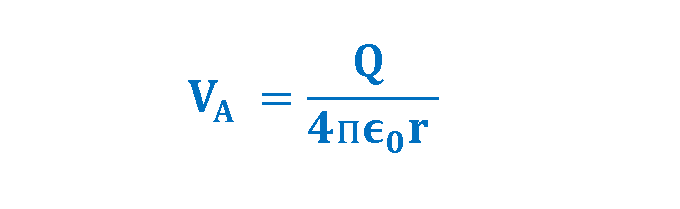
With this choice, simple mathematics can be used to show that by substituting Equation 5 in Equation 4 and Equation 2 and assuming that the point B is in infinity (VB= 0), we can calculate the electric potential VA. Finally, this electric potential created by a particle of charge Q at any radial distance r from the particle is given by Equation 6:
Equation 6: The definition of the electric potential
Generally, every charged object sets up an electric potential VP at all points throughout its electric field. The electric field of a point charge extends throughout space, so its electric potential does, also. The zero point of electric potential could be taken anywhere but is usually taken to be an infinite distance from the charge, far from its influence and the influence of any other charges.
The SI unit of electric potential, which is also referred to as voltagedrop, is ‘Joules per Coulomb’ or volt (V) after AlessandroVolta (1745-1827), an Italian physicist and chemist who was a pioneer of electricity, where 1 V = 1 J/C. it means 1 J of work must be done to move a 1-C charge between two points that are at a potential difference of 1 V.
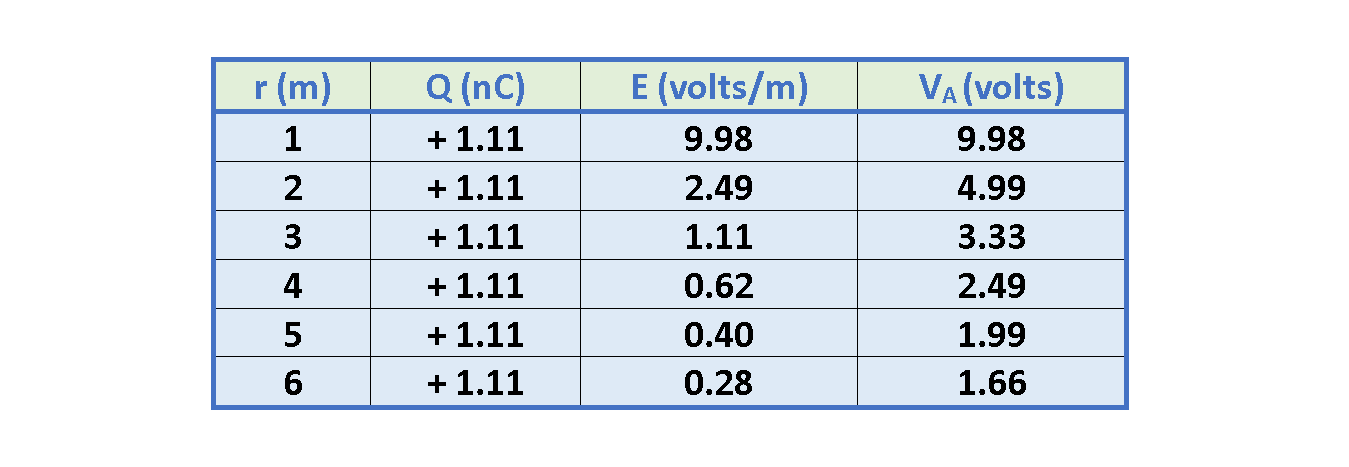
Equation 6 shows that the electric potential (VA) increases as the positive test charge q0 moves closer to the point charge Q. This can be shown numerically if we assume (Q = +1.11 × 10-9C = +1.11 nC). Now we can calculate the electric potential and the electric field in terms of different values of r. The results are provided in Table 1:
Table 1: The electric field and the electric potential values versus distance r
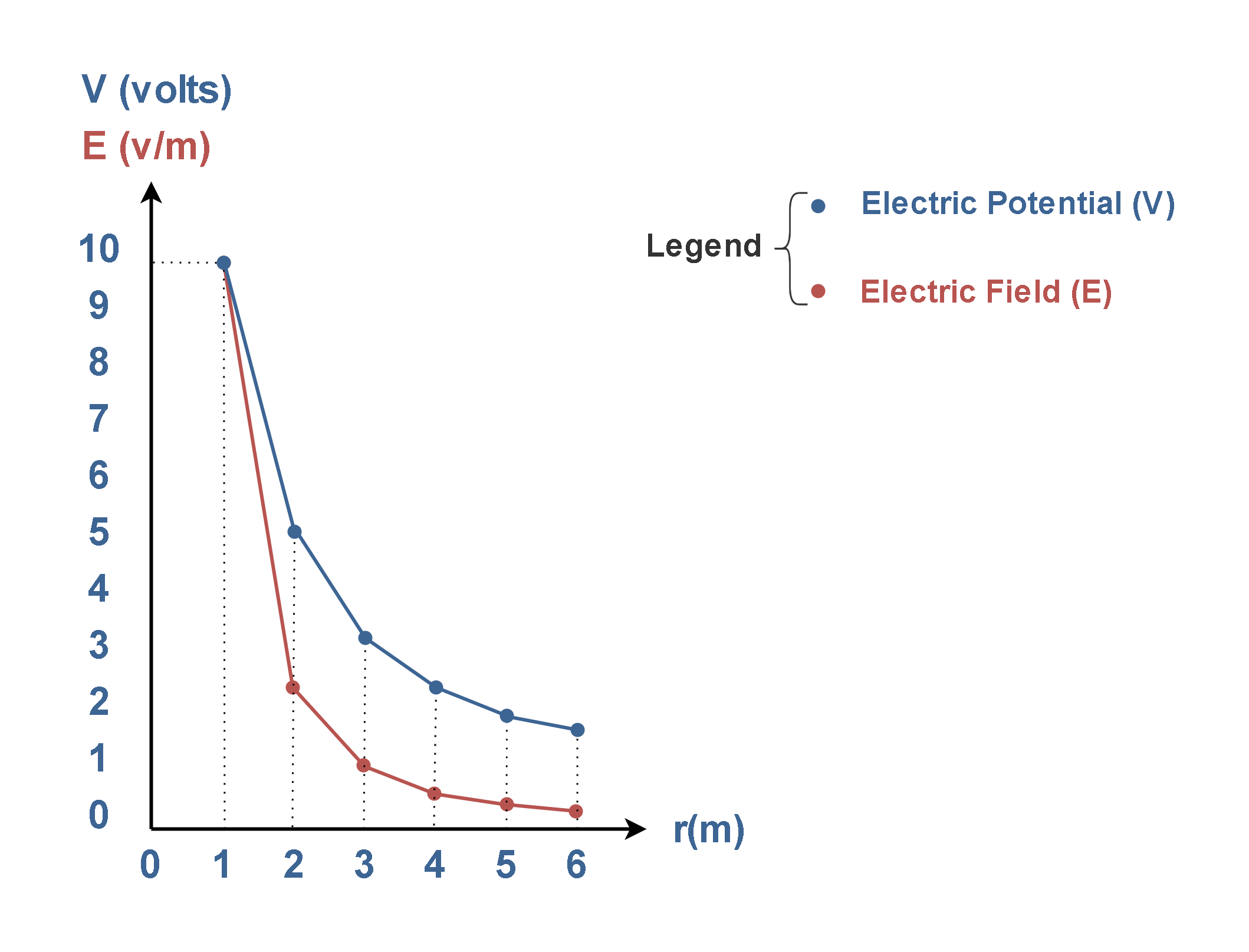
Figure 3 shows the plot of the electric field and the electric potential based on the numerical data in Table 1.
Figure 3: The electric field and the electric potential versus distance r
This visual representation summarizes the fundamental principles regarding how the electric potential and field strength vary with distance from a point charge source. Figure 3 confirms these key points:
The electric potential V (blue curve) decreases inversely with increasing r, following a 1/r dependence as described by Equation 6.
The electric field strength E (red curve) decreases more rapidly, following an inverse square 1/r2 dependence as described by Equation 5.
At smaller values of r, both V and E have higher magnitudes since the test point is closer to the point charge source.
As r increases towards larger values, V decreases gradually while E drops off more sharply.
Electric Potential Due To A Group Of Charged Particles
We can find the net electric potential at a point due to a group of charged particles with the help of the superposition principle. It means the total electric potential at some point P due to several point charges is the algebraic sum of the electric potentials due to the individual charges. Compared to the electric field, it is simpler to sum several scalar quantities than to sum several vector quantities whose directions and components must be considered.
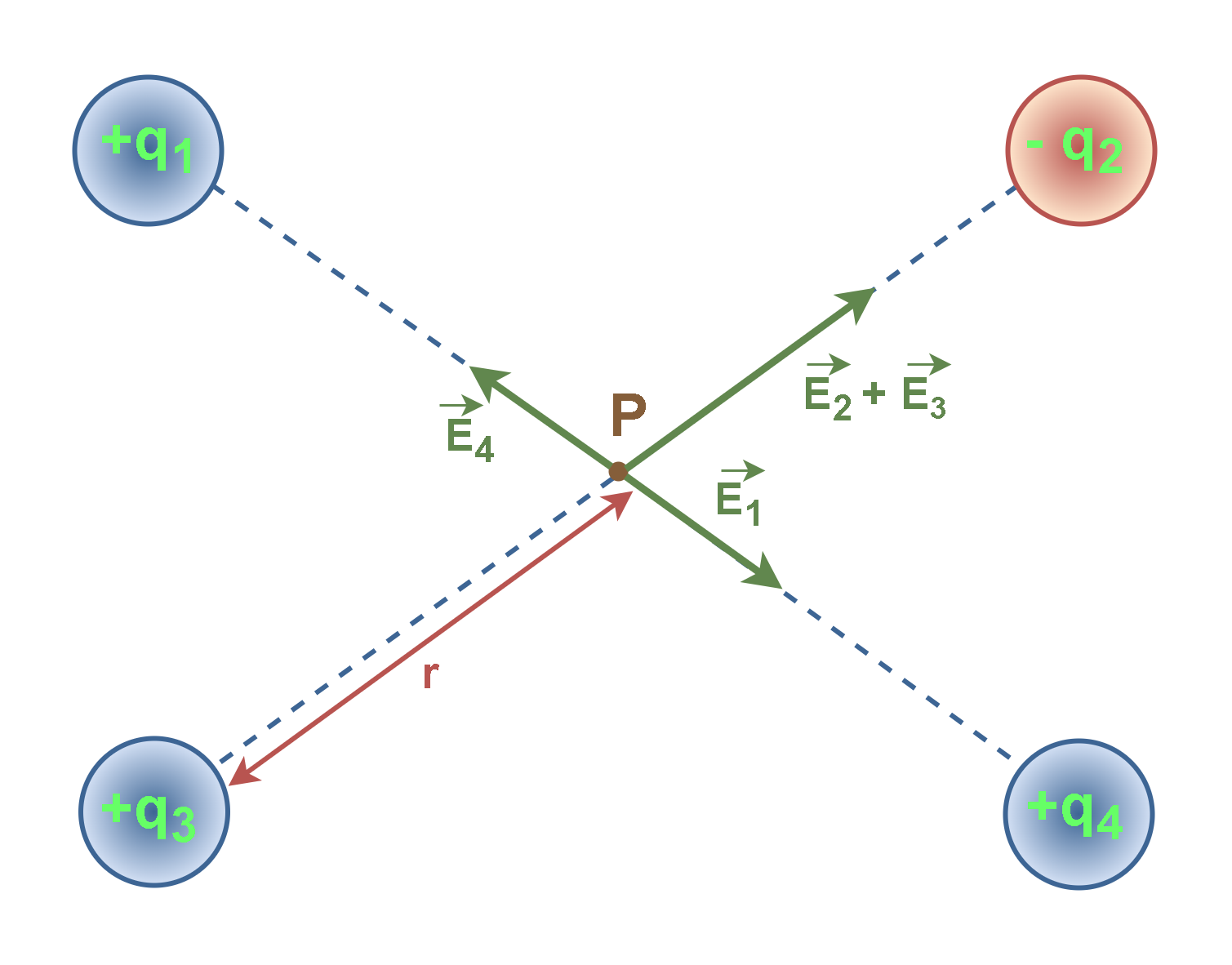
Figure 4 shows a configuration of 4 charged particles, q1 to q4, which are placed in corners of a square. We can calculate the electric potential at point P in the center of the square.
Figure 4: Finding the net electric potential due to 4 charges
The electric field vectors (E1, E2, E3, E4) due to each charge are shown at the center point P. The distance ‘r’ from each charge to the center point P is also indicated in the diagram.
Recall that the electric potential created by a point charge Q is generally given by Equation 7 which is another form of Equation 6:
Equation 7: The definition of the electric potential based on the Coulomb constant
where, ke = 8.9875 × 109 (Nm2/C2) is the Coulomb’s constant.
Unlike electric field superposition, which involves a sum of vectors, the superposition of electric potentials simply requires evaluating a sum of scalars. Equation 8 gives the simple key to find the net electric potential in a general configuration of ‘n’ charged particles.
Equation 8: Finding the net electric potential for a group of n charges
Here qi is the value of the ith charge and ri is the radial distance of the given point from the ith charge. In this configuration all the charges have equal distances to the point P. Using Equation 7, an algebraic sum with the plus or minus sign of the charge included, we calculate separately the potential resulting from each charge at the given point. Then we sum the potentials.
In our example with n = 4 charges in Figure 4, we assume the value of charges are: q1 = +12nC, q2 = -24nC, q3 = +31nC, q4 = +17nC and the distance between charges and point P is r = 0.919 m.
Thus, the net potential at point P is calculated by Equation 9:
Equation 9: Finding the net electric potential for a group of 4 charges in our example
Finally, the net potential at point P is V = 352 volts! It may seem strange that a combination of such small changes can make such big voltage!
Equipotential Surfaces
An equipotential surface is the collection of points in space that are all at the same electric potential. The potential difference between any two points on an equipotential surface is zero. Hence, no work is required to move a charge on an equipotential surface. The electric field at every point of an equipotential surface is perpendicular to the surface.
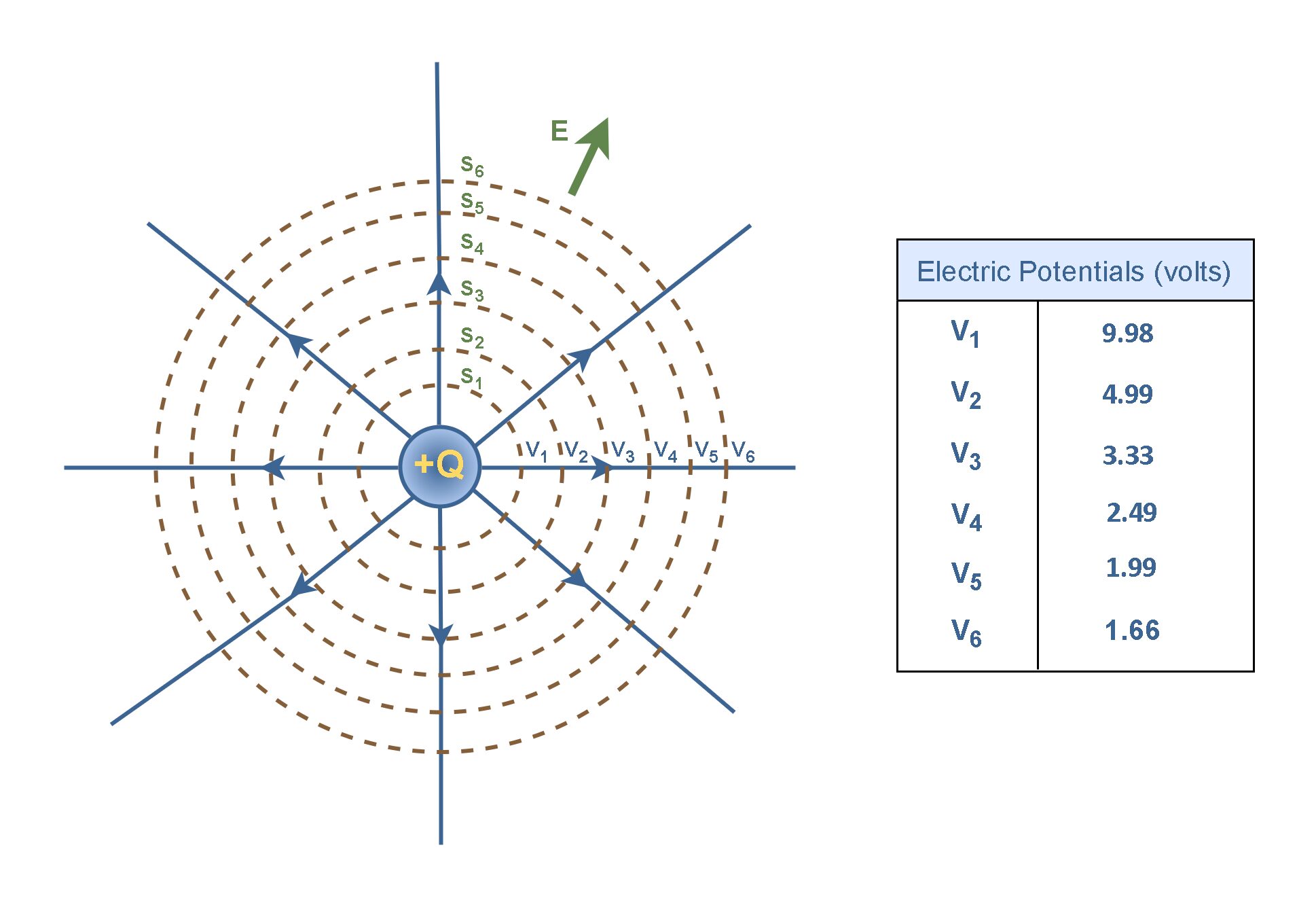
Equipotential surfaces can be represented on a diagram by drawing two-dimensional equipotential contours. Figure 5 depicts the concentric circular equipotential contours (brown dotted circles) surrounding the positive point charge +Q.
Figure 5: Finding the equipotential surfaces for the point charge +Q
Following our previous example, if Q = +1.11 nC, the equipotential contours are plotted as S1 to S6. Each circle can be assigned a constant electric potential (V1 to V6) and the voltage values are provided in a table in Figure 5. These values are mapped to the different equipotential contours in the plot.
It is also to be noted that electric potentials rise in the opposite direction to E. As we start from the location of the charged object +Q and move outward, by increasing distance, the equipotential values decrease from 9.98 volts (V1) to 1.66 volts (V6) at the outermost circle.
This relation shows that, for a single-point charge, the potential is constant on any surface on which ‘r‘ is constant. Imagine that by rotating the two-dimensional plot in Figure 5 about the vertical axis, the complete three-dimensional plot is generated and the dashed circular equipotential lines in the present plot are changed to spherical equipotential surfaces. It follows that the equipotential surfaces of a point charge are a family of spheres centered on the point charge.
Summary
If an electric field has the same magnitude and direction everywhere in a particular space, it is said to be uniform.
A non-uniform electric field varies in magnitude according to different positions.
The electric potential is the amount of potential energy per unit charge when a positive test charge is brought in from infinity.
The word ‘Potential’ at a point is a scalar quantity.
The amount of work per unit charge is equal to the force per unit charge (or field intensity E) times the distance through which the charge is moved.
Voltage is another term for electric potential, it measures the difference in electric potential between two points.
The electric potential difference between points A and B, (VB-VA) is defined to be the change in potential energy of a charge q moved from A to B, divided by the charge.
The SI unit of electric potential is the joule per coulomb (J/C), called the volt (V).
Because the electric force is conservative, the change in potential energy ΔU between two points is the same for all paths between those points (it is path-independent).
The electric potential of two or more charges is obtained by applying the superposition principle.
A surface on which all points are at the same potential is called an equipotential surface.
Equipotential surfaces are always perpendicular to electric field lines.
It is obvious that with increasing r, the electric potential VA associated with the point charge Q decreases as 1/r, in contrast to the magnitude of the charge’s electric field, which decreases as 1/r2.
Conexio Technologies, Inc. has recently introduced Conexio Stratus Pro, a battery-powered development board built around Nordic Semiconductor’s nRF9161 cellular modem. The unique aspect of this board is that it has support for LTE-M, NB-IoT, and GPS connectivity and to make things even more interesting it has also support for DECT NR+, and GNSS making it suitable for environmental monitors, smart meters, and industrial automation devices.
Other features of this board include support for solar energy harvesting and an onboard Qwiic connector which gives access to various modules. The form factor of this board also resembles Adafruit Feather so many HATS and adapter modules are compatible with this board.
The company designed the board to be easy to use and compatible with various software platforms. Not only that the board comes preloaded with 10 years of mobile data and SMS, as a value-added feature. Developers can leverage the preprogrammed MCUBoot bootloader, a Visual Studio Code plugin, and integrations with cloud platforms like Edge Impulse, Golioth, and Memfault for machine learning, OTA updates, and remote device management. Additionally, it connects to Datacake for easy data visualization. Documentation and resources are available on the company’s website and GitHub.
Onboard 10-pin 0.05 ” (1.27 mm) mini SWD/JTAG pin connector
Dimensions: 66.04 mm x 25.40 mm
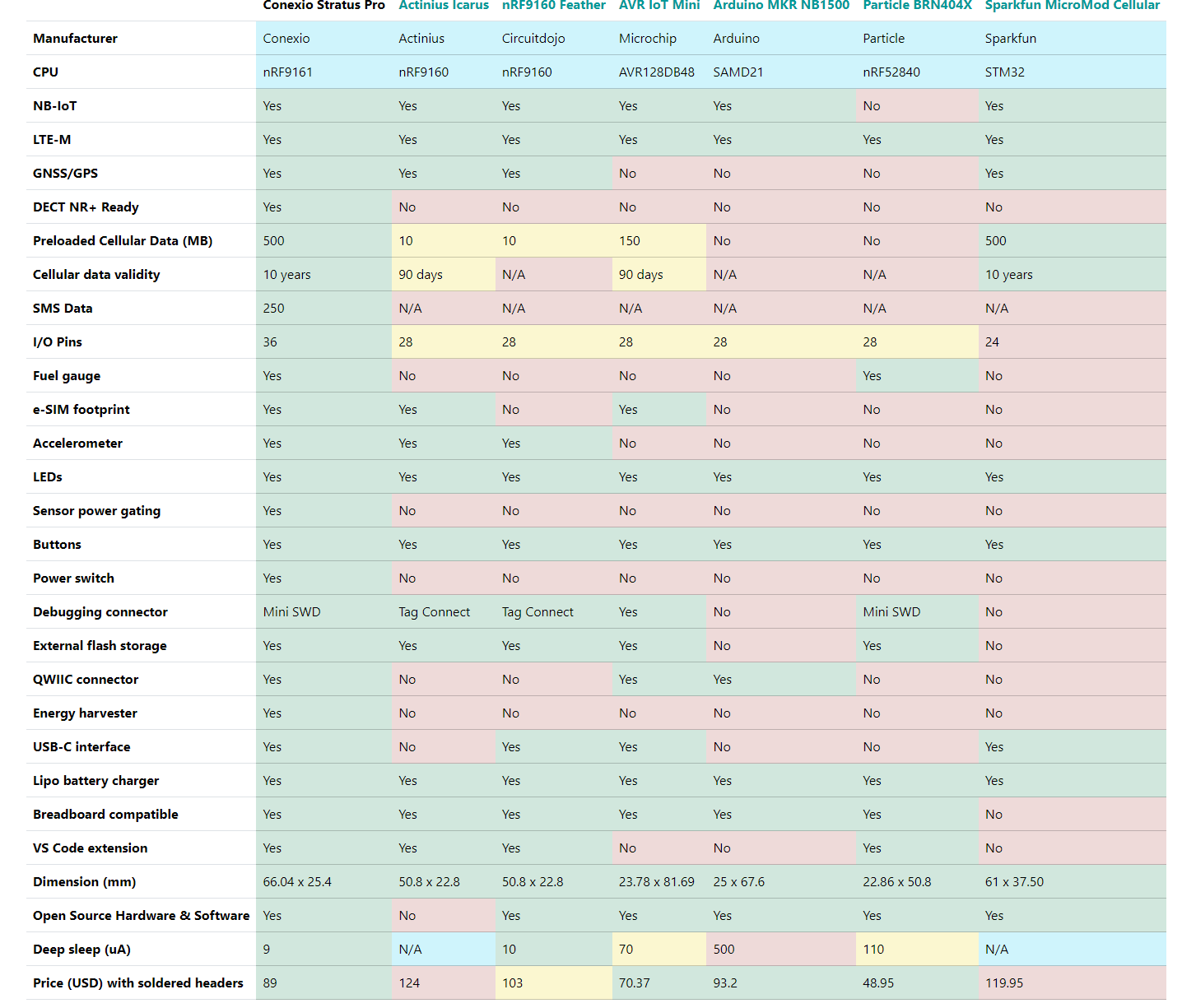
The company also provides a helpful table where the Conexio Stratus Pro is compared with devices like the Actinius Icarus, nRF9160 Feather, and Arduino MKR NB1500, which gives you a clear idea about the board’s capabilities in a very interesting way.
For those who are interested in the Conexio Stratus Pro dev board, the dev kit is available on Crowd Supply. The early bird price is $83, and the regular price is $89, with shipping starting in September 2024.
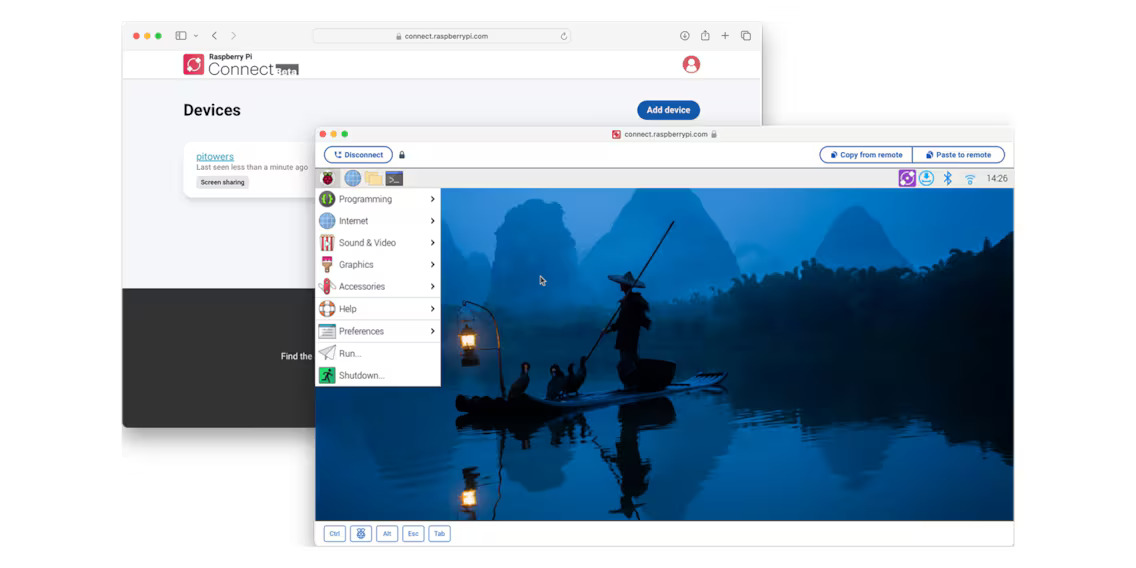
The Raspberry Pi now has an official remote access tool. Raspberry Pi Connect makes setting up remote access to the small computer easier.
With Raspberry Pi Connect, you can access your single-board computer from anywhere in the world using a browser. Provided it is a Raspberry Pi 400, 4, or 5, the Raspberry Pi Foundation has released a beta version of the new remote access tool, which will make things a lot easier for newcomers in particular, or for those who are not satisfied with previous solutions using VNC, SSH, and the like.
You need the 64-bit distribution of Raspberry Pi OS Bookworm (with Wayland Window Server) to benefit from the tool. You can download this with the Raspberry Pi Imager and install it on your RPI 400, 4, or 5. If you already use the OS, you can update to the new tool. To do this, open the terminal and enter the commands “sudo apt update,” “sudo apt upgrade,” and “sudo apt install rpi-connect” in sequence. After a restart, a new taskbar icon should appear in the top right-hand corner of the screen. To get started, click on it and select “Login.”
Remote access is established with Pi Connect via a secure peer-to-peer connection. The “In-Browser VNC Client” and the “VNC Server,” i.e., your Raspberry Pi, are connected as with Zoom, Teams, and others: The open standard WebRTC is used.
The connection is established with an “RPI-Connect Daemon” via Foundation servers. Once the connection has been established, data traffic is normally direct. Unless there is a connection problem, in which case the data traffic is DTLS-encrypted via the manufacturer’s servers. You can find out whether the existing connection is being forwarded by moving the mouse over the padlock symbol in the browser. As the tool is currently still a beta version, there are still limitations. On the one hand, the new service only has a single relay server, which is located in the UK. This means that the latency can still be high at the moment as long as communication is taking place with the relay.
You can find out what other limitations there are in this documentation.
The Foundation intends to keep the use of Raspberry Pi Connect free of charge for private users in the future, as long as a direct remote access connection (no connection forwarding via server) is used.
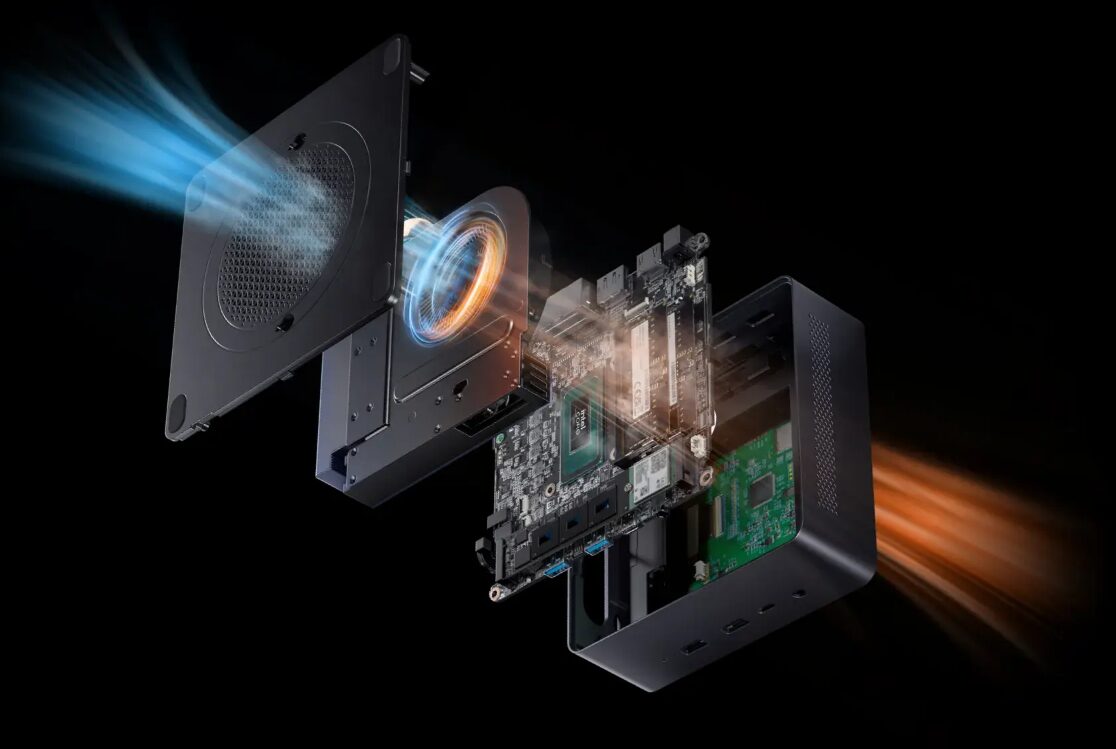
The newly launched AtomMan X7 Ti by Minisforum is a compact mini PC designed for diverse computing needs. It features robust specifications, including the Intel Core Ultra 9 185H processor for high processing power and Intel Arc Graphics for enhanced performance in gaming and graphic design.
AtomMan-X7-T-interfaces
Memory capabilities are substantial, with support for DDR5 Dual channels in SODIMM slots that can handle speeds up to 5600MHz and a maximum capacity of 96GB. For storage, the device is equipped with an M.2 2280 PCIe 4.0 SSD and an additional M.2 2230 PCIe 4.0 SSD slot, providing fast data access and extensive storage space. 185H — 16C/22T (6P+8E+2LP-E), (Up to 5.1 GHz); 24 MB Intel Smart Cache, 35W – 115W TDP, Intel Arc Graphics (up to 2.35 GHz), 8 Xe-cores.
Connectivity options include an M.2 2230 Wi-Fi module supporting the latest Wi-Fi 7 and Bluetooth 5.4 standards. The device features a variety of output ports including HDMI 2.1, DP 2.0, and dual USB4 ports, facilitating multiple types of external connections. It also comes with two RJ45 5G Ethernet ports and a range of USB ports from USB2.0 to USB3.2 Gen2, along with an OCulink port.
AtomMan-X7-T-design
The AtomMan X7 Ti features dual DMICs and a full HD 1080P camera with Windows Hello for enhanced security and user interaction. It supports clear audio-visual outputs through HDMI 2.1 and DP 2.0 ports, enabling a quad-screen display with two additional USB 4.0 ports for extensive multi-display setups. The unit also includes a 4-inch 480P touchscreen for basic output and interactivity. The design of the AtomMan X7 Ti measures 145 x 145 x 48.6mm, allowing it to be placed in limited spaces without significant compromise to functionality. It operates on a DC 19V power supply and the system comes pre-installed with Windows 11 Home.
On the other hand, the DEG1 eGPU Dock by Minisforum enhances external graphics performance with its PCIe 4.0×4 interface, supporting up to 64GT/s for reduced performance loss. It features a built-in signal amplifier for stable high-speed connections and a minimalist design that accommodates video cards of any length, including high-end models like the NVIDIA RTX 4090 and AMD RX 7900 XTX. Compatible with ATX/SFX power supplies, it also simplifies the operation with a startup system linked directly to the host computer’s main power switch, saving both electricity and effort according to the company.
The AtomMan X7 Ti by Minisforum is available at an early bird discount. The barebone version is priced at $669.00, while a configuration with 32GB of RAM and a 1TB SSD is available for $849.00. An optional DEG1 eGPU Dock can be added for an additional $50.00. All options are set to ship on July 10th.
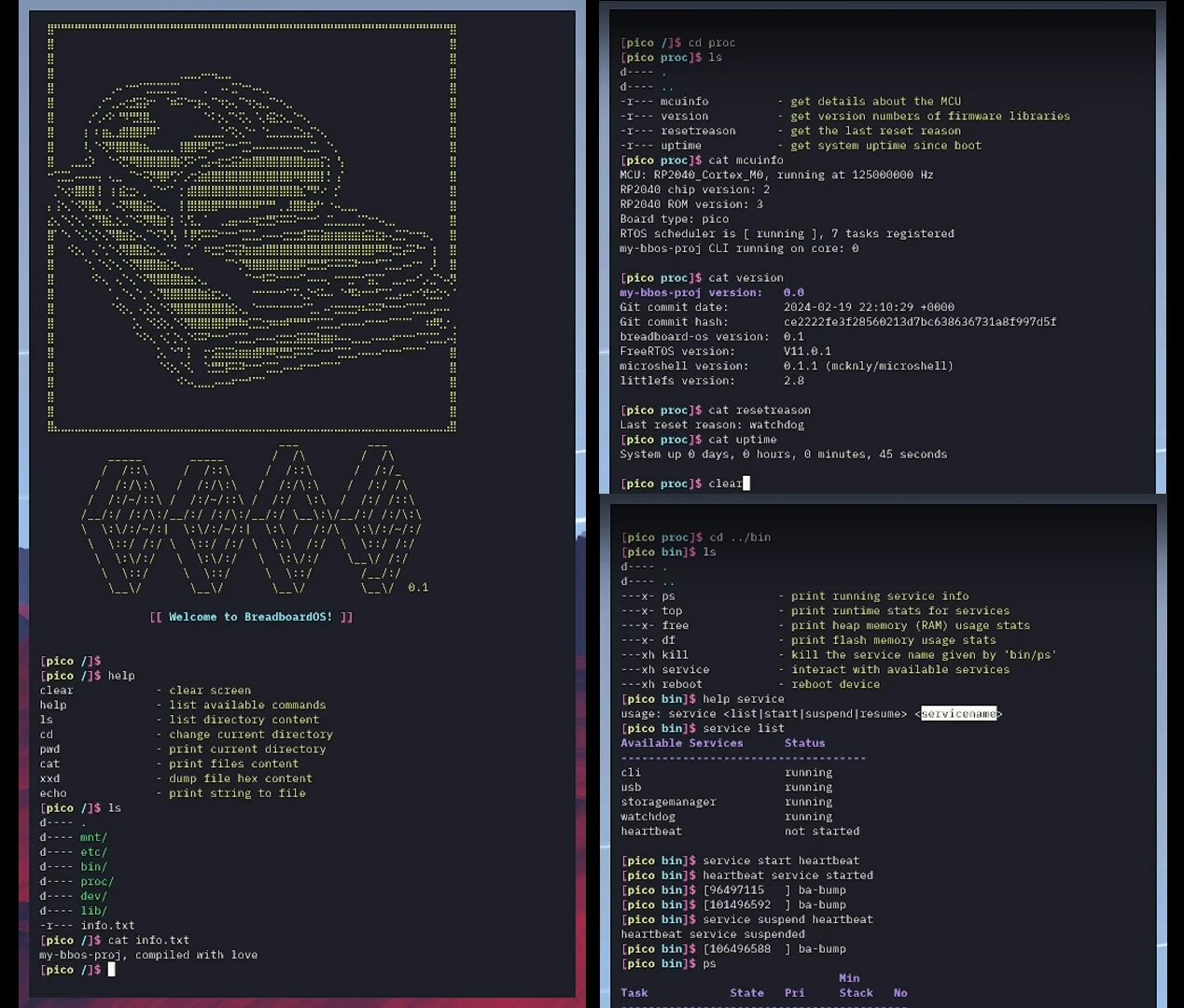
Cavin McKinley’s BreadboardOS is an open-source firmware platform for the Raspberry Pi RP2040 MCU, built around FreeRTOS and featuring a command-line interface (CLI) reminiscent of the Linux terminal. The terminal implementation is based on a customized fork of the Microshell project, organized into POSIX-style folders/files, providing a familiar user interface for interacting with the hardware on the MCU. This innovative firmware platform brings a range of Linux-like capabilities to the RP2040, enhancing its functionality and ease of use.
BreadboardOS highlights include its FreeRTOS foundation, tools for checking system resources such as ps, top, free, and df commands, and the ability to interact with chip I/O and serial buses directly from the terminal using commands like cat and echo.
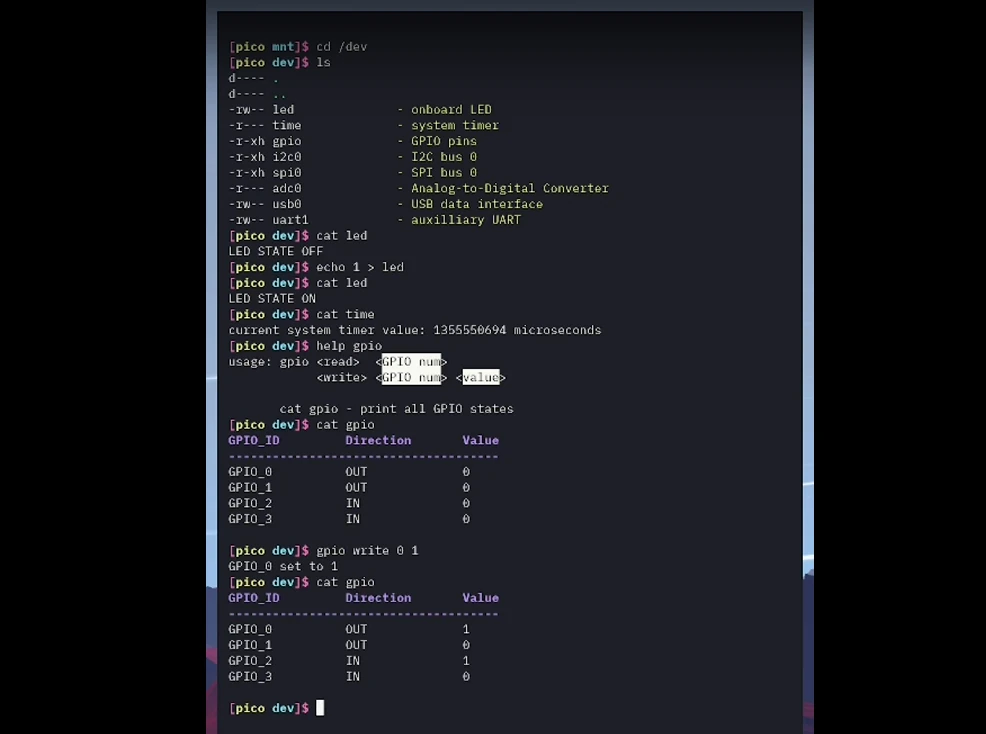
For example, you can print the list of GPIOs with cat gpio. It features an onboard flash filesystem with wear-leveling (leveraging the LittleFS project), peripheral hardware initialization routines, a watchdog service for system failsafe recovery, and an RTOS task manager for dynamically controlling system services at runtime. The “rootfs” includes familiar directories (mnt, etc, bin, proc, dev, and lib) similar to a minimal Linux distribution.
You’ll find the source code released under an MIT license and instructions to build BreadboardOS on GitHub.
Raspberry-Pi-RP2040-terminal-GPIO-control
Currently, BreadboardOS (or BBOS for short) is implemented on the Raspberry Pi RP2040 only, but it was built with portability in mind. The project is structured so that all hardware-specific code resides in a single directory (hardware_pico) with a header file (hardware_config.h) providing HAL functionality. The source code is released under an MIT license, with instructions to build BreadboardOS available on GitHub. While there isn’t extensive documentation on the available commands, you can explore them by watching the accompanying video or installing BreadboardOS on a Raspberry Pi Pico or Pico W. More information can be found on GitHub.