




BLDC motors help power our day to day equipment, like computer hard drives, fans, CD/DVD players etc. One of this BLDC is Tinymovr. Tinymovr is an affordable BLDC motor controller for precise control of 3-phase brushless motors. Tinymovr is highly integrated incorporating an advanced MCU (Qorvo PAC5527), compact power stage, integrated absolute angle encoder (MPS MA702) and CAN and UART connectivity. Tinymovr can operate in Torque, Velocity or Position modes, using Field Oriented Control (FOC). It can be integrated at the back of the brushless motor for a compact setup. Tinymovr measures at 40x40mm (1.57×1.57 inches). For us to understand BLDC motors, we have to explain how a brushless and brushed motors work.
Brushed motor consists of a set of coils, wound around a rotating armature, which sits inside a magnetic casing. Brushed motors functions through a rotary switch on the motor’s shaft called a commutator. It is made up of a rotating cylinder divided into multiple metal contact segments on the rotor. The segments are connected to conductor winding on the rotor. Two or more stationary contacts called “brushes”, made of a soft conductor like graphite, press against the commutator, making sliding electrical contact with successive segments as the rotor turns, providing electric current to the winding. Each time the rotor rotates by 180° the commutator reverses the direction of the electric current applied to a given winding, so the magnetic field creates a torque in one direction. However due to friction of the brushes sliding along the rotating commutator segments there are usually power losses that can be significant in a low power motor. Also, as a result of friction, the soft brush material wears down, creating dust, and eventually the brushes will have to be replaced. Due to resistance of the sliding brush contact, there will be a voltage drop in the motor circuit. There could also be a case of fire hazard due to repeated abrupt switching of the current through the inductance of the windings, causing sparks at the commutator contacts.
Brushless motors however, have permanent magnets that rotate around a fixed armature, eliminating problems associated with connecting current to the moving armature. An electronic controller swaps out the brush/commutator assembly of the brushed DC motor, which continually switches the phase to the winding to keep the motor turning. The controller performs similar timed power distribution by using a solid-state circuit rather than the brush/commutator system. Brushless motors offer several advantages over brushed DC motors, including high torque to weight ratio, more torque per watt (increased efficiency), increased reliability, reduced noise, longer lifetime (no brush and commutator erosion), elimination of ionizing sparks from the commutator, and overall reduction of electromagnetic interference (EMI). With no windings on the rotor, they are not subjected to centrifugal forces, and because the windings are supported by the housing, they can be cooled by conduction, requiring no airflow inside the motor for cooling. This in turn means that the motor’s internals can be entirely enclosed and protected from dirt or other foreign matter.
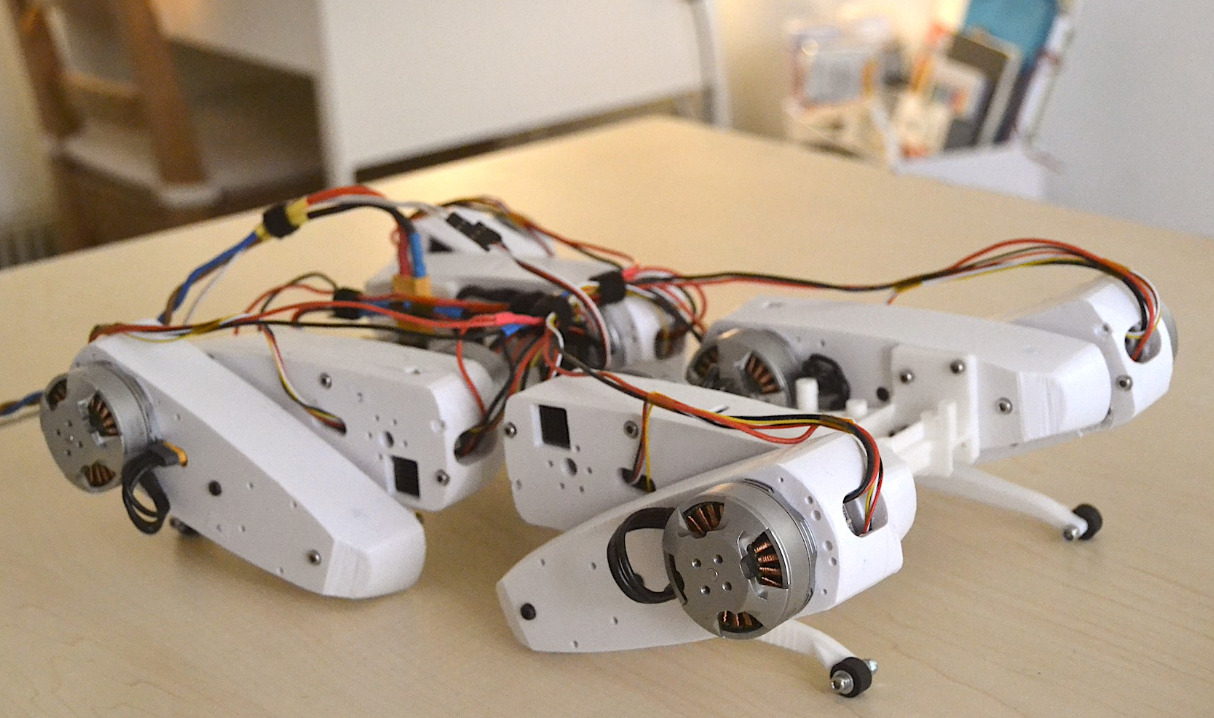
Yannis Chatzikonstantinou has posted on Hackday, information about Firmware improvements, CAN Protocol, and Improving Position Tracking regarding the Tinymovr. He has completed a quadruped robot construction using the Tinymovr board. He says
“The robot is 8DOF (so no holonomic motion yet), and carries 8x Tinymovr boards embedded in the legs. In it’s current state it has off-board power supply and control and no IMU. I’ll be gradually integrating those on-board over the next iterations. The robot weights just 1.8 kilograms (around 4 pounds), which is expected to rise to 1.9-2.0 kg together with a Raspberry pi and small battery.”
The third revision of Tinymovr (R3) is currently in testing phase and will be soon in production. Tinymovr is very affordable, with a BOM that is less than $50. More information about brushless motors can be found here. Visit Yannis Chatzikonstantinou project page for more information about the Tinymovr.
RELATED POSTS
 24 July, 2020 13 Amazing Gerber Viewer Software for Windows
24 July, 2020 13 Amazing Gerber Viewer Software for Windows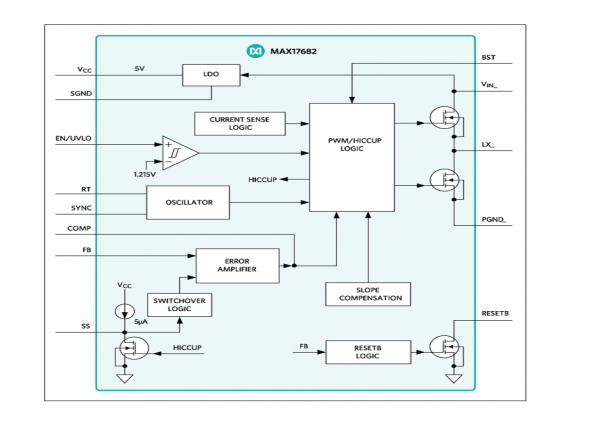 27 May, 2017 4.5 to 42V-in, 4 x 4mm, isolating buck DC-DC delivers 3.7A
27 May, 2017 4.5 to 42V-in, 4 x 4mm, isolating buck DC-DC delivers 3.7A 18 April, 2018 Micro Soldering Station for 10$
18 April, 2018 Micro Soldering Station for 10$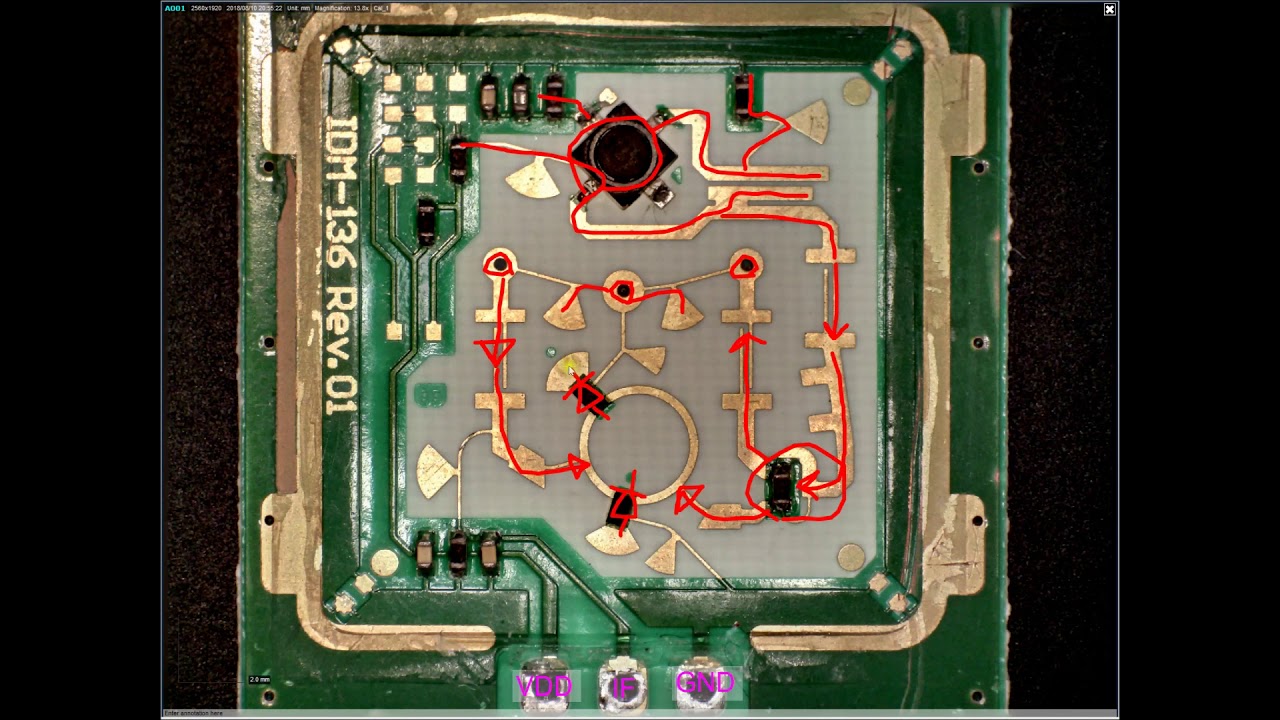 29 August, 2018 Tutorial, Experiment & Teardown of a 24GHz Doppler Radar Module
29 August, 2018 Tutorial, Experiment & Teardown of a 24GHz Doppler Radar Module 6 June, 2020 PowerEver – A tiny device that turns your generic power bank into a non-stop power supply
6 June, 2020 PowerEver – A tiny device that turns your generic power bank into a non-stop power supply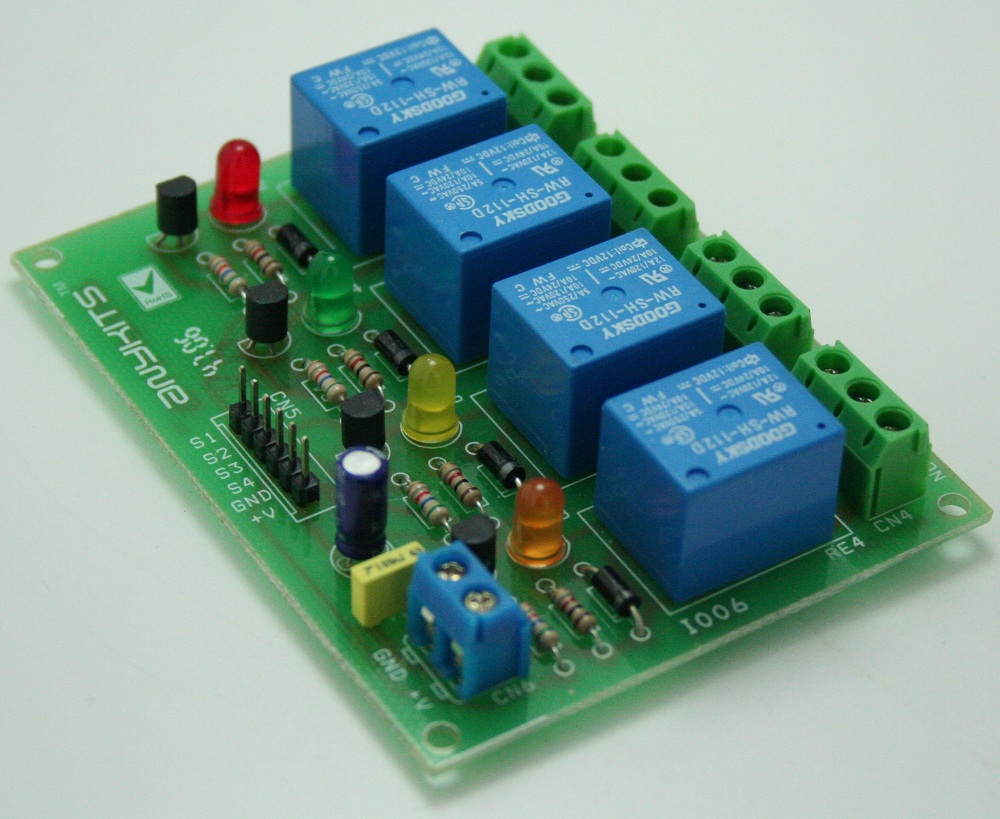 30 June, 2016 4 Channel Relay Board
30 June, 2016 4 Channel Relay Board





